2026: Orca 2.0
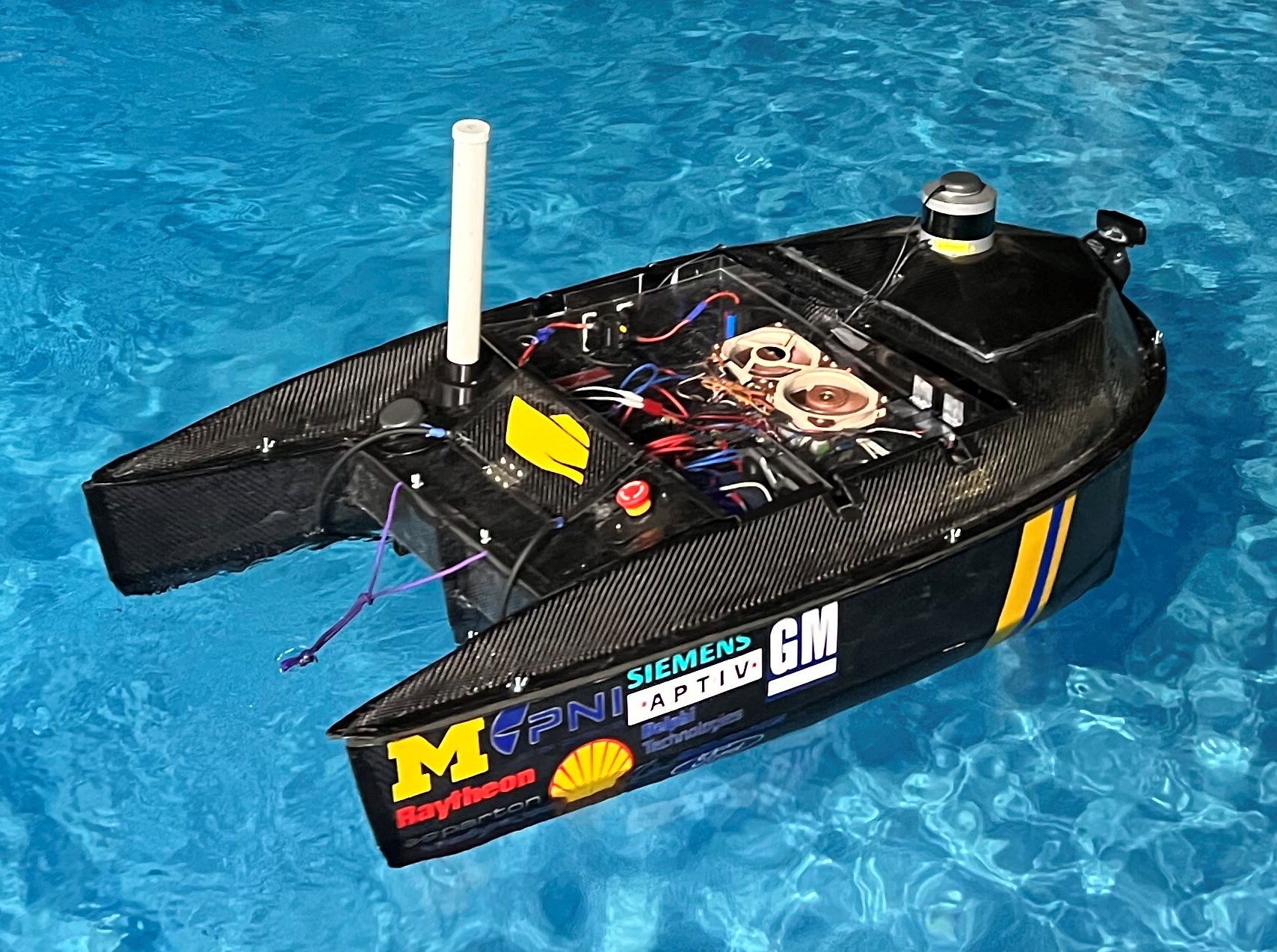
At the 2026 RoboBoat Competition, The Orca sets sail once more, emerging stronger through the all-new X-Bow hull design. UM::Autonomy's 2026 vessel focuses on pushing the limits of every aspect while being more impressive than ever before.
Building on 2025’s mechanical foundation, the 2026 strategy targets optimization and intelligent autonomy. Through custom PCBs and AI-driven perception and autonomy, the team has shifted from prototyping to refinement, relying on a matured simulation workflow to rigorously validate complex behaviors before physical deployment.