
RoboBoat 2024: Ducks Overboard
Nathan Benderson Park
Sarasota, Florida
RoboNation RoboBoat is an international competition where students design, build, and compete with self-driving robotic boats, in a series of tests aimed at challenging teams through a variety autonomous (self-driving) tasks. We will be joined by 18 teams from 3 continents.
Competition Strategy
Due to the short build cycle this year—just 5 months from competition details to competition—we decided to reuse our 2023 hull, The Phoenix, albeit with major structural improvements. We focused on simplicity in design and workflow in order to further ensure a reliable, maintainable, and modular system. Understanding the tighter time constraints of this season, we put a greater emphasis was placed on design validation and in-water testing, which was facilitated by maintaining an operable vessel and reducing design complexity from last year. We moved to testing strategy that relocated the team permanently into its testing environment, made testing a weekly process from the start of the season, and allowed for multiple modes of testing to guarantee success.
Scroll down for more details ↓
Static Judging Criteria
Besides a team's performance autonomously, we are judged on aspects of both our team and the boat.
Design Documentation
The team must prepare a website, a technical design report, and a video for judges to score. These are evaluated based on how well they introduce the team and its structure as well as design considerations of the boat.
Presentation
The team must present to the judges live their decisions leading to the design of the boat.
Other Judging Criteria
Before the boat can participate in an autonomous challenge, several prerequisite activites must be completed.
Static Safety Inspection
As the boats are very high powered, a runaway boat could damage itself and hurt others. Therefore, competition staff ensure that the boat follows several safety rules:
- The boat stops when a physical red button is pressed on the boat
- The boat stops when a remote switch is flipped, or the remote switch loses power or connection
- The boat does not have any sharp edges so that people in the water can touch the boat safely
UM::Autonomy is proud to have been one of the first three teams to pass the safety inspection at the 2023 competition. We have continued this spirit throughout the 2023-2024 year: safety is considered highly in all situations, from battery and testing site training to ensuring the vessel is safe at all times.
Boat Thrust-to-Weight Ratio
The competition rewards fast and light craft. Therefore, a sliding scale is used where points are lost faster the heavier it gets. The boat is weighed and its thrust is measured every day it is entered in the water. The Phoenix weighs 40 pounds, the lightest weight class.
Autonomy Challenge
The main part of the challenge is the tasks that the vessel must perform autonomously. However, we must first qualify before we perform autonomous operation on the full course.
Qualification
Teams will be given opportunities to practice, display their capabilities, and earn their spot in the final round. They will have access to three duplicate courses, each containing the eight tasks. Throughout this time, teams can choose to test strategies, gather data, or qualify for tasks. A certain level of completion—"minimum performance criteria"—is required to complete a task. Once a team has qualified for enough tasks, they enter the Semi-Final rounds.
Semi-Finals
Teams must score some number of points in Semi-Finals rounds to progress to Finals.
Finals
Teams who have successfully qualified will have access to the finals courses. Importantly, each vessel must operate autonomously for the entire duration of the run; remote-controlled survey runs are not allowed. This means teams cannot manually control their vessels to gather data or assess the field before or during their time slot, emphasizing the critical importance of pre-run preparation and programming accuracy. They will be required to navigate through initial gates, attempt a series of tasks in their chosen sequence, and finally return to the home base to conclude the run. All teams making it to the final round will secure a higher final ranking over those who do not reach this stage of the competition.
High Priority Challenges
Navigation Channel
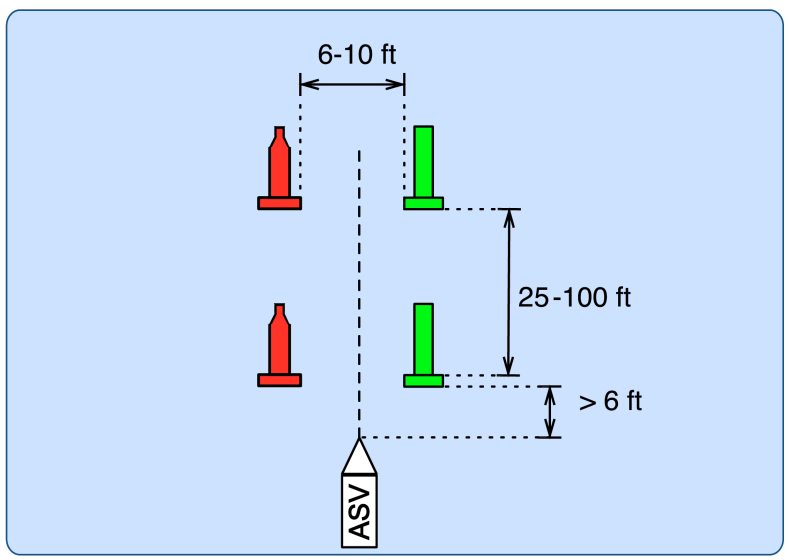
- Description
- This challenge is mandatory before attempting other tasks. The ASV needs to pass through two sets of gates (a pair of red and green buoys) and starts autonomous navigation at a minimum of 6 ft before the set of gates.
- Analysis
- As it is mandatory, this challenge is of high importance. In 2019, the boat could only successfully pass the navigation channel once out of four qualification runs as a result of a major electrical failure onboard. In 2023, it was completed with high success due to our extensive testing in water and in simulation. However, additional tuning was needed upon arrival to the competition site as the boat's computer vision system would occasionally fail to detect a buoy.
- Goal
- 14 out of 15 successful runs
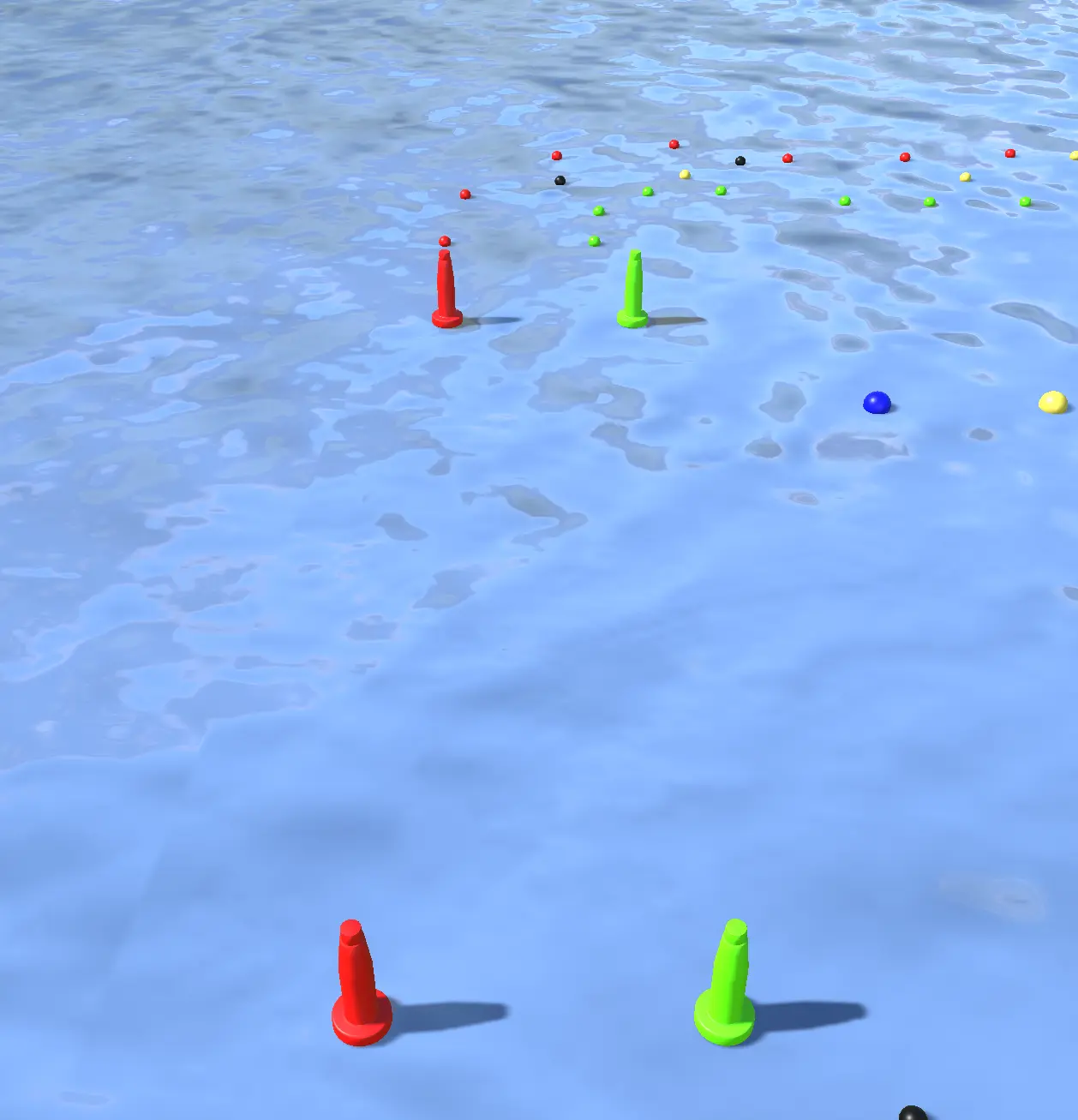
Follow the Path
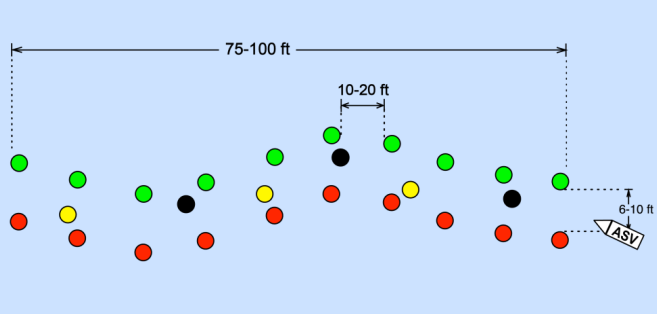
- Description
- The ASV passes through between multiple sets of gates (pairs of red and green buoys) The ASV also avoids intermittent yellow and black buoys of various sizes and counts them.
- Analysis
-
The challenge requires minimal external hardware or software development and mainly just
involves careful navigational operability and fine motor control. This challenge should be
tested and fine-tuned early in the development process.
In 2023, we found that this challenge revealed some disadvantages of our indoors testing area. Specifically, our obstacle-avoidance system decided that the best way to avoid hitting buoys was to go outside of the red-green channel! While technically following our instructions, it didn't score many points. We have since revised our navigation algorithm to take this restriction into account.
- Goal
- 9 out of 10 successful runs
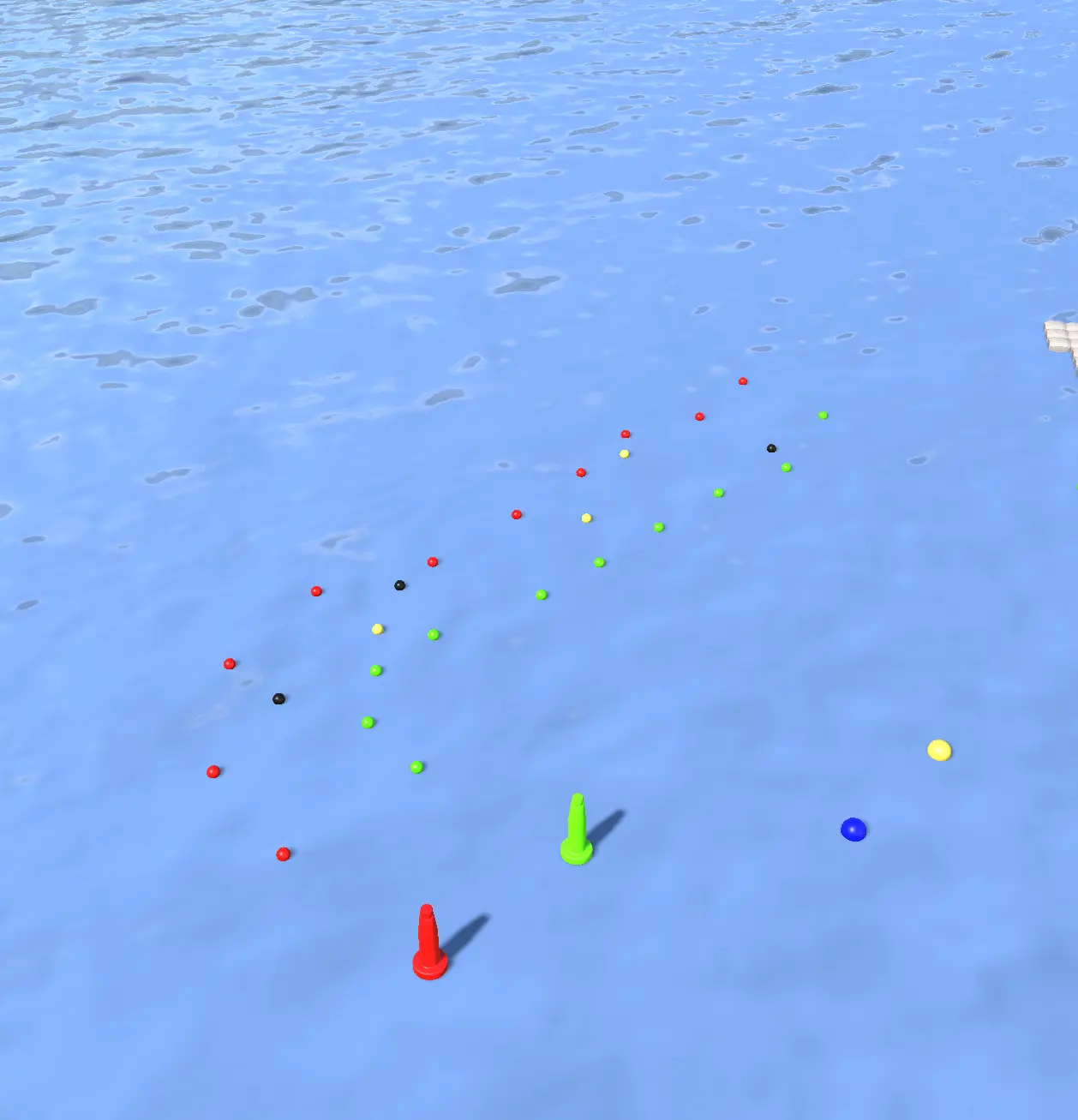
Speed Challenge
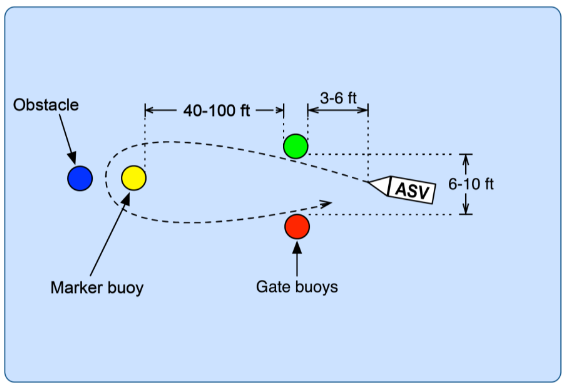
- Description
- The ASV enters the gate buoys, maneuvers around the yellow marker buoy, and exits thought the same gate buoys, as quickly as possible. The timer starts when the bow (front) crosses the gate buoys and stops when the stern (back) crosses the gate buoys.
- Analysis
-
Based on the 2023 score sheet, teams that completed this challenge did so in 50, 75, and 100 seconds. This is
significantly higher than the 2019 score
sheet which revealed that a time between 25-45s is needed to remain competitive, with the fastest 2019 run
coming in at 27 seconds. Nevertheless, we plan to beat the 2023 times and remain competitive with those that
competed in 2019.
This year introduces an obstacle buoy. We do not expect a challenge with this because our navigation algorithm is already very familiar with avoiding buoys, and we do not expect to even need any code changes.
- Goal
- 9 out of 10 successful runs. We hope for a baseline of 45 seconds, and a goal of 35 seconds.
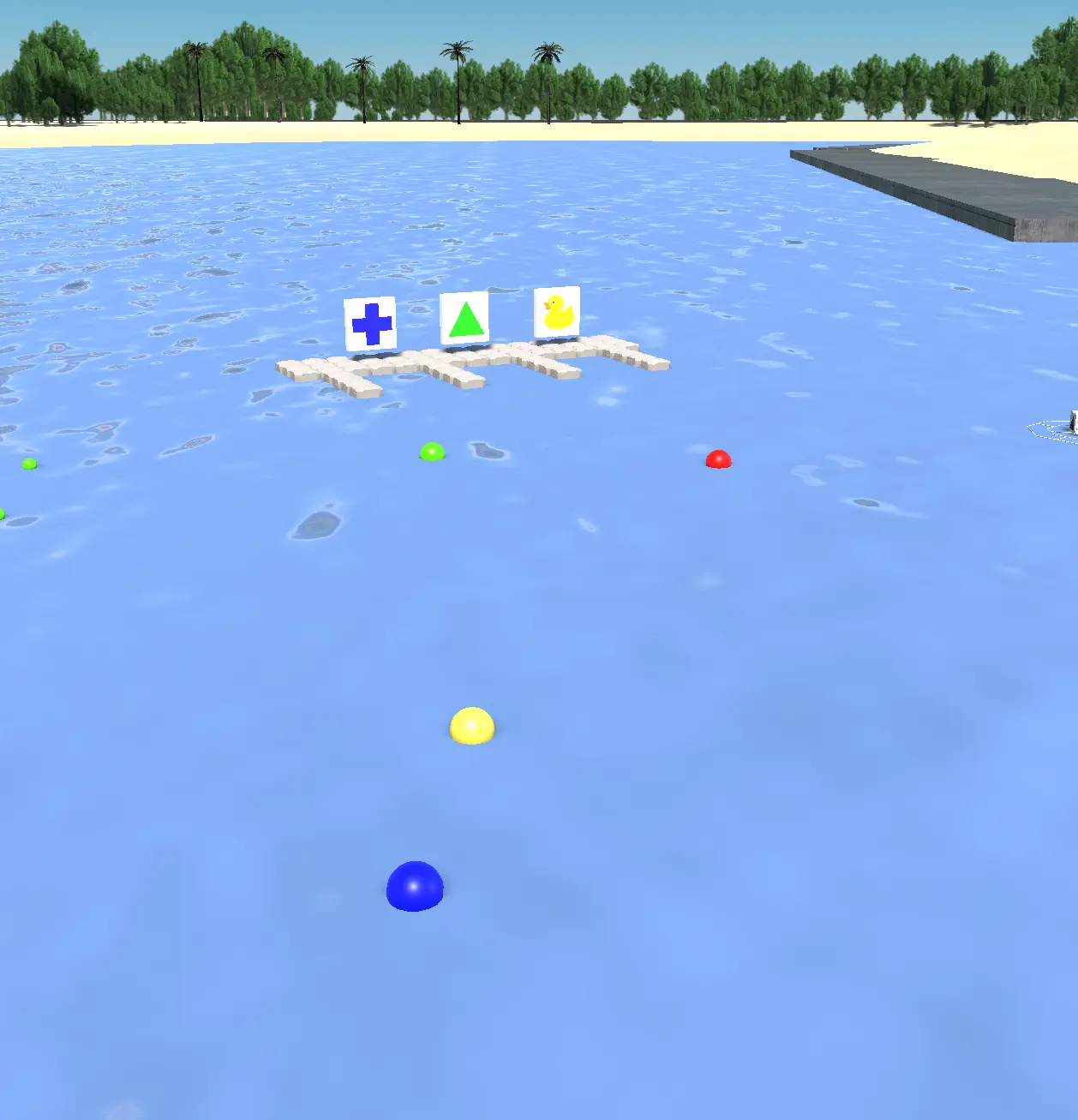
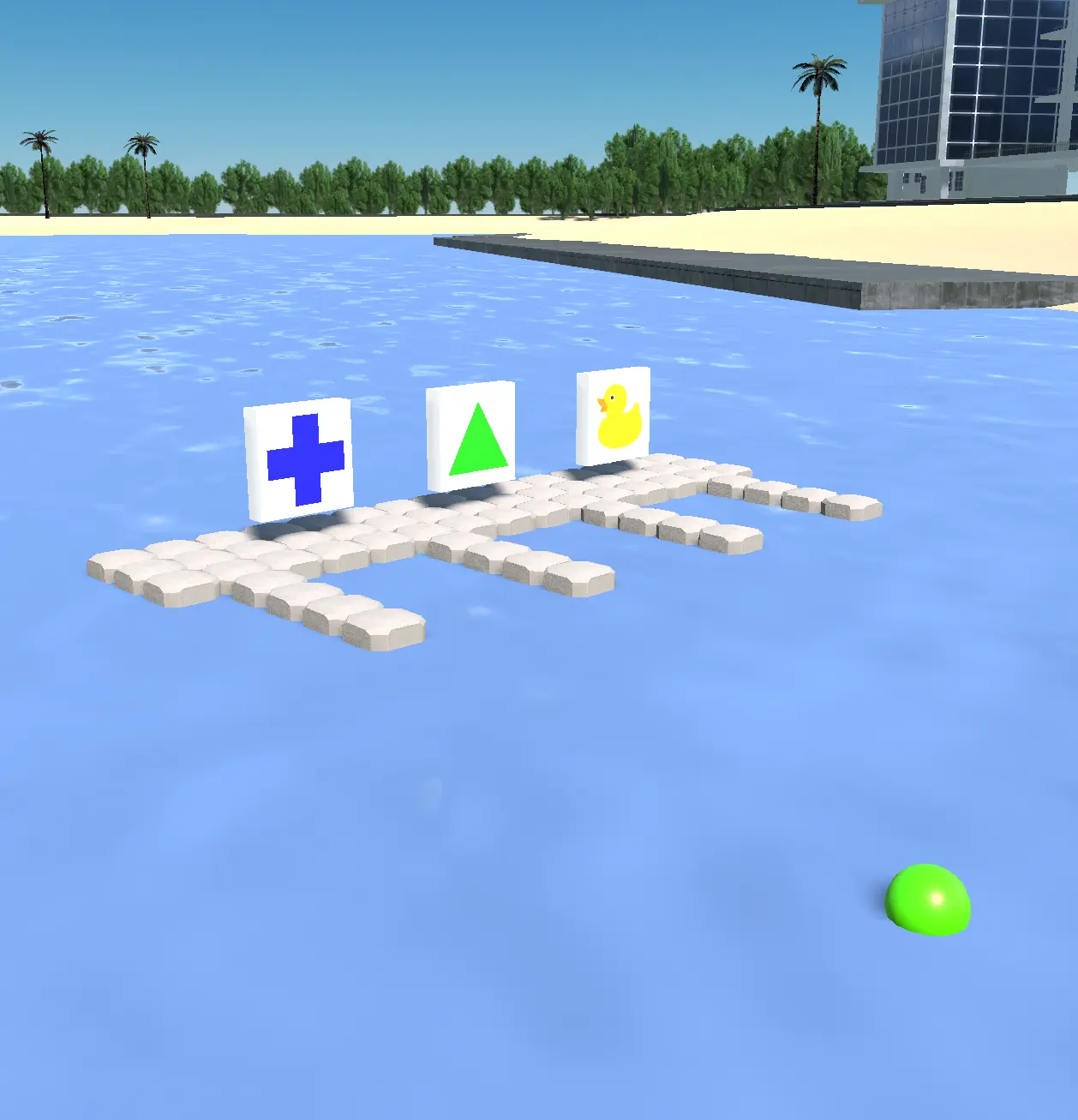
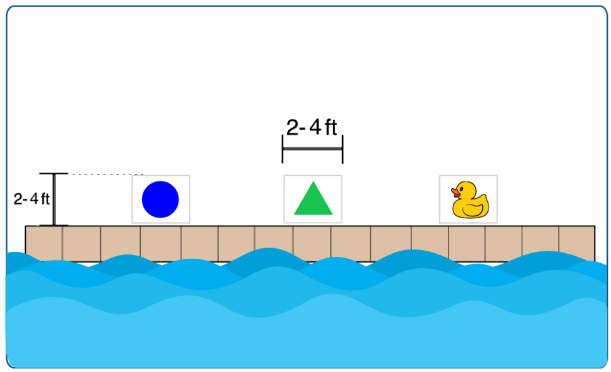
Docking
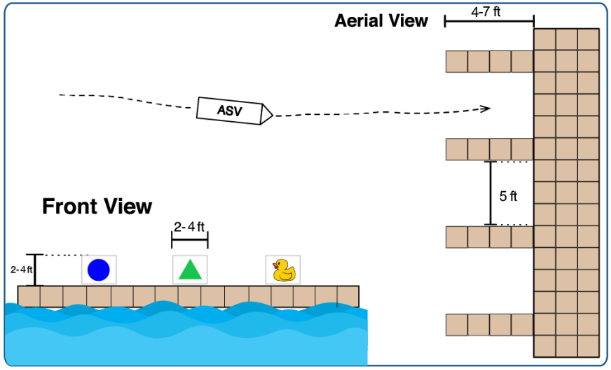
- Description
- Before the time slot starts, teams are assigned a color and must dock at the bay with the matching color. To dock, contact must simply be made with the dock.
- Analysis
- This challenge is a bit more involved in terms of computer and color/shape recognition but does not require external hardware development. We plan to train our computer vision model on color only, as it was all but guaranteed that each poster will be a unique color. We had success with this strategy in 2023, and plan to do it again.
- Goal
- 9 out of 10 successful runs
Medium Priority Challenges
Duck Wash
- Description
- The ASV detects the target duck poster and shoots water on it for 5 seconds continuously. The ASV may pump the water from the environment or store it on board.
- Analysis
- This task follows a similar task from last year, also involving water blasts. However, the task is simplified this year as the target area is far bigger. We think that it will not be difficult to achieve this task, although we may run into issues with spacing: we had hoped to simply push into the dock to keep us in place, but that may interfere with our water blast depending on its mounting position.
- Goal
- 3 out of 5 successful runs
Lower Priority Challenges
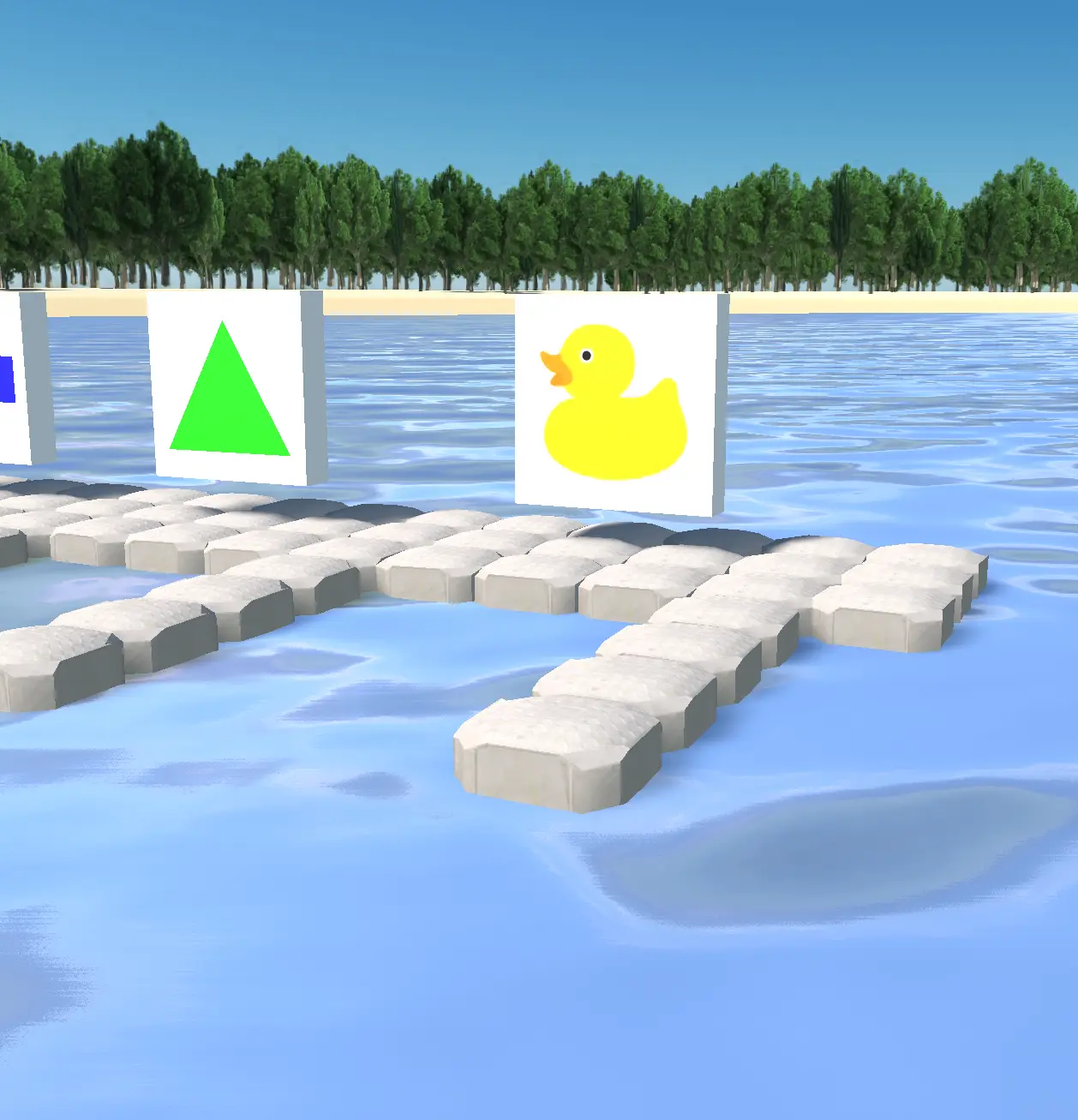
Delivery Octagon
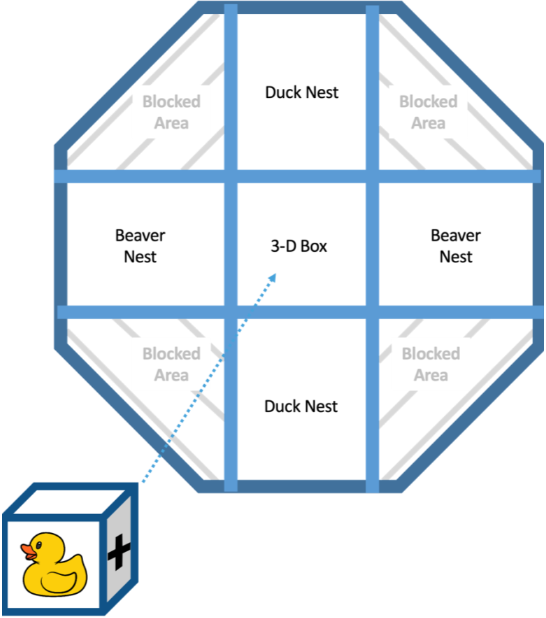
- Description
- The ASV detects the different posters around the center and delivers ducks and "beavers" (racquetballs) to various areas. A set number of racquetballs are provided as preload so that the ASV may complete this challenge without collecting additional objects.
- Analysis
- We expect this challenge to be somewhat difficult, although we still plan to complete it. We are designing a simple mechanism to deliver the preloaded balls to this challenge. We expect a challenge in detecting the specific areas to deliver balls to.
- Goal
- 2/5 successful deliveries
Not Attempted Challenges
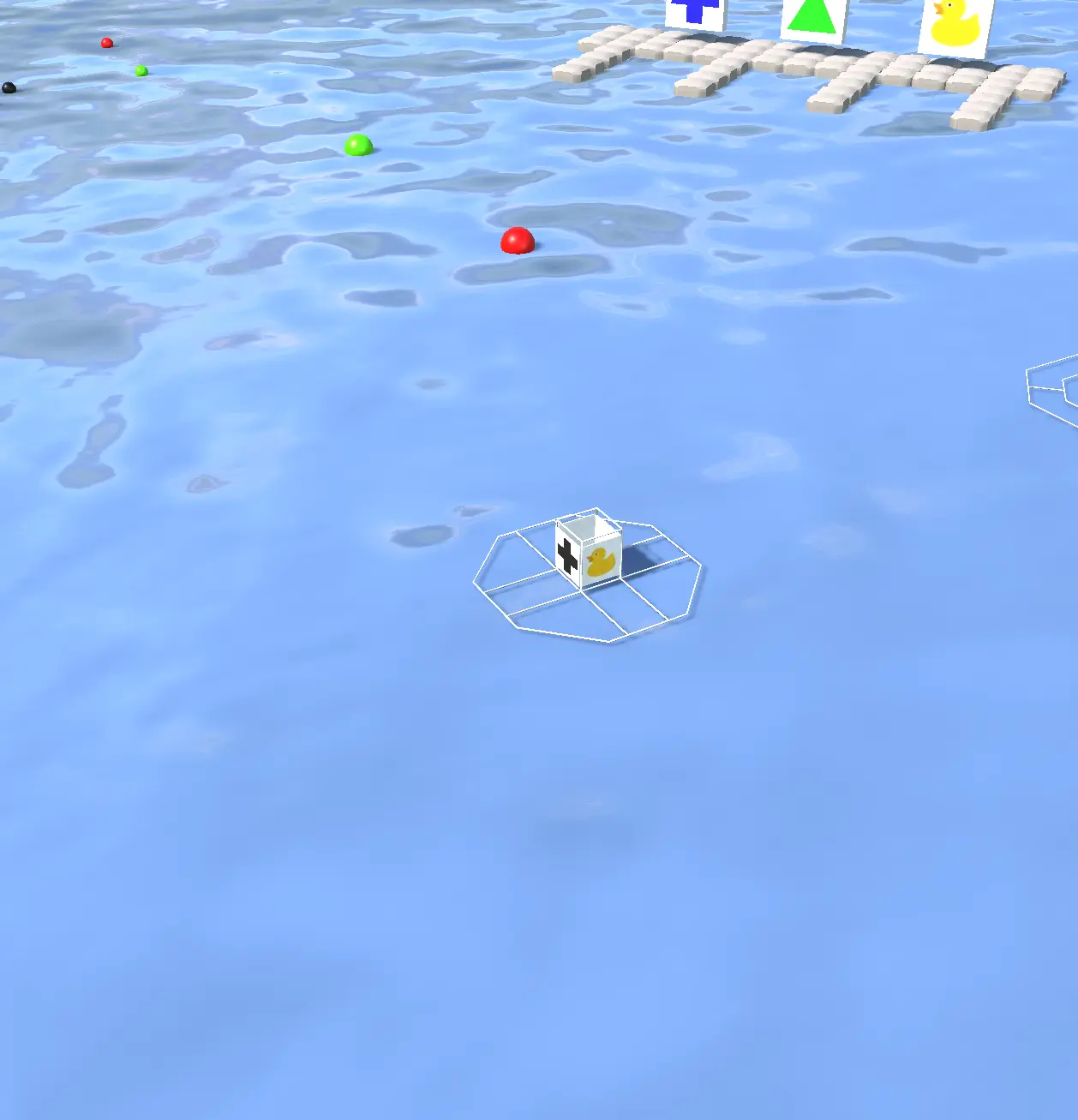
Collection Octagon
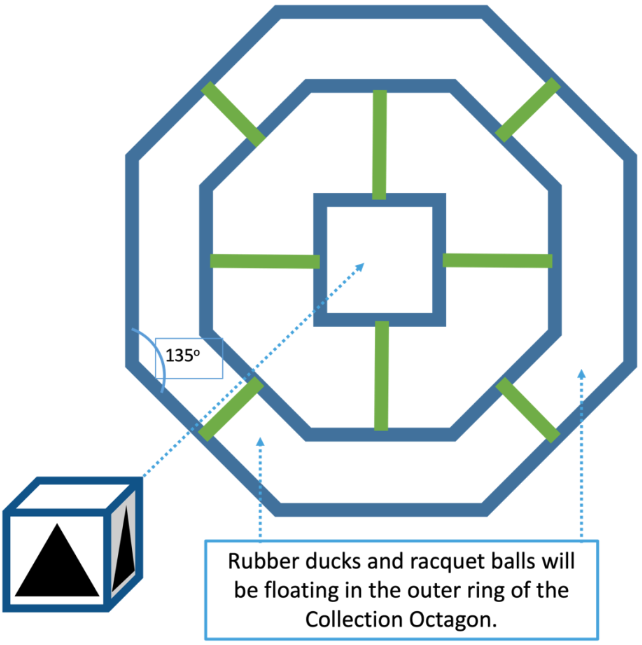
- Description
- The ASV detects the triangular posters which designates the area to collect raquetballs and ducks from. The ASV may then use them as extra objects to deliver to the Delivery Octagon.
- Analysis
- UM::Autonomy decided that the mechanisms to grab and retrieve objects will be extremely difficult to produce. As such, we decided to put this challenge off. After the competition, we may work on this challenge more in case it appears again in 2025.
- Goal
- N/A
