Competition Results
UM::Autonomy placed 6th overall, and 3rd among American Universities.

Sarasota, Florida
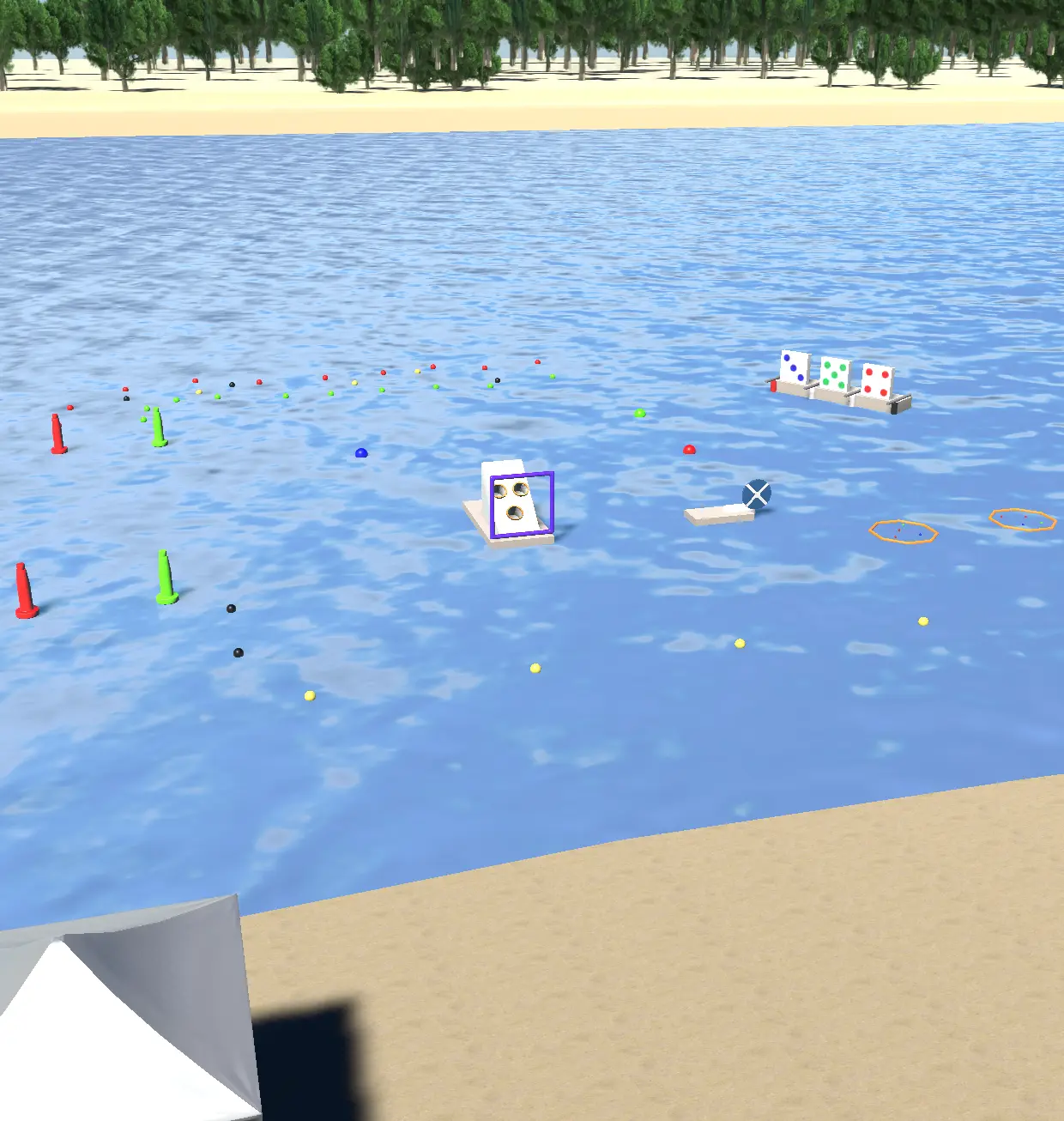
RoboBoat is an international competition where students design, build, and compete with self-driving robotic boats, in a series of tests aimed at challenging teams through a variety autonomous (self-driving) tasks. In 2023, we were joined by 22 other teams from 4 continents.
UM::Autonomy placed 6th overall, and 3rd among American Universities.
For this competition season, we tested with the 2022 hull (itself a refurbished 2017 hull) for most of the year, since it was already built. A new hull made of carbon fiber was being built concurrently by the mechanical team. At the last minute, days before departure for the competition, it was ready. The team spent the weekend preparing the new boat for the competition, and thanks to simulator testing, this process went smoothly and few code changes were needed.

Besides a team's performance autonomously, we are judged on aspects of both our team and the boat.
The team must prepare a website, a technical design report, and a video for judges to score. These are evaluated based on how well they introduce the team and its structure as well as design considerations of the boat.
The team must present to the judges live their decisions leading to the design of the boat.
Before the boat can participate in an autonomous challenge, several prerequisite activites must be completed.
As the boats are very high powered, a runaway boat could damage itself and hurt others. Therefore, competition staff ensure that the boat follows several safety rules:
UM::Autonomy is proud to have been one of the first three teams to pass the safety inspection at the 2023 competition.
The competition rewards fast and light craft. Therefore, a sliding scale is used where points are lost faster the heavier it gets. The boat is weighed and its thrust is measured every day it is entered in the water. In 2023, UM::Autonomy's boat weighed 55 pounds, the lightest weight class.
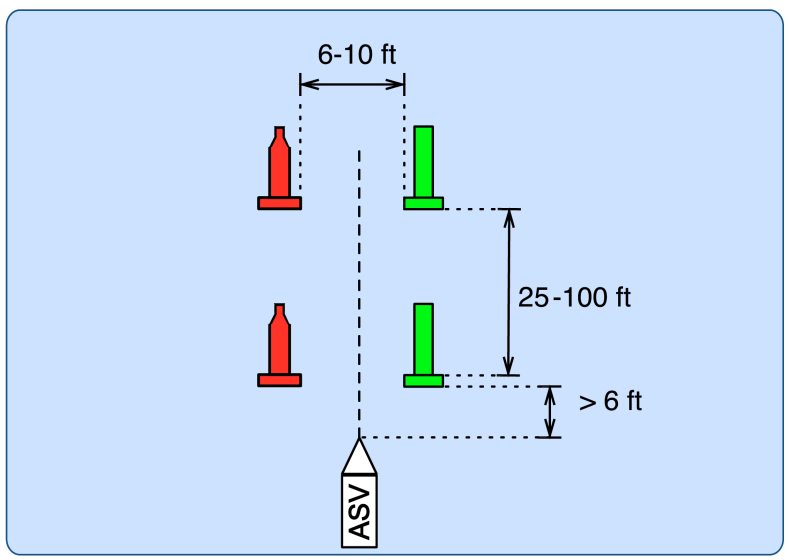
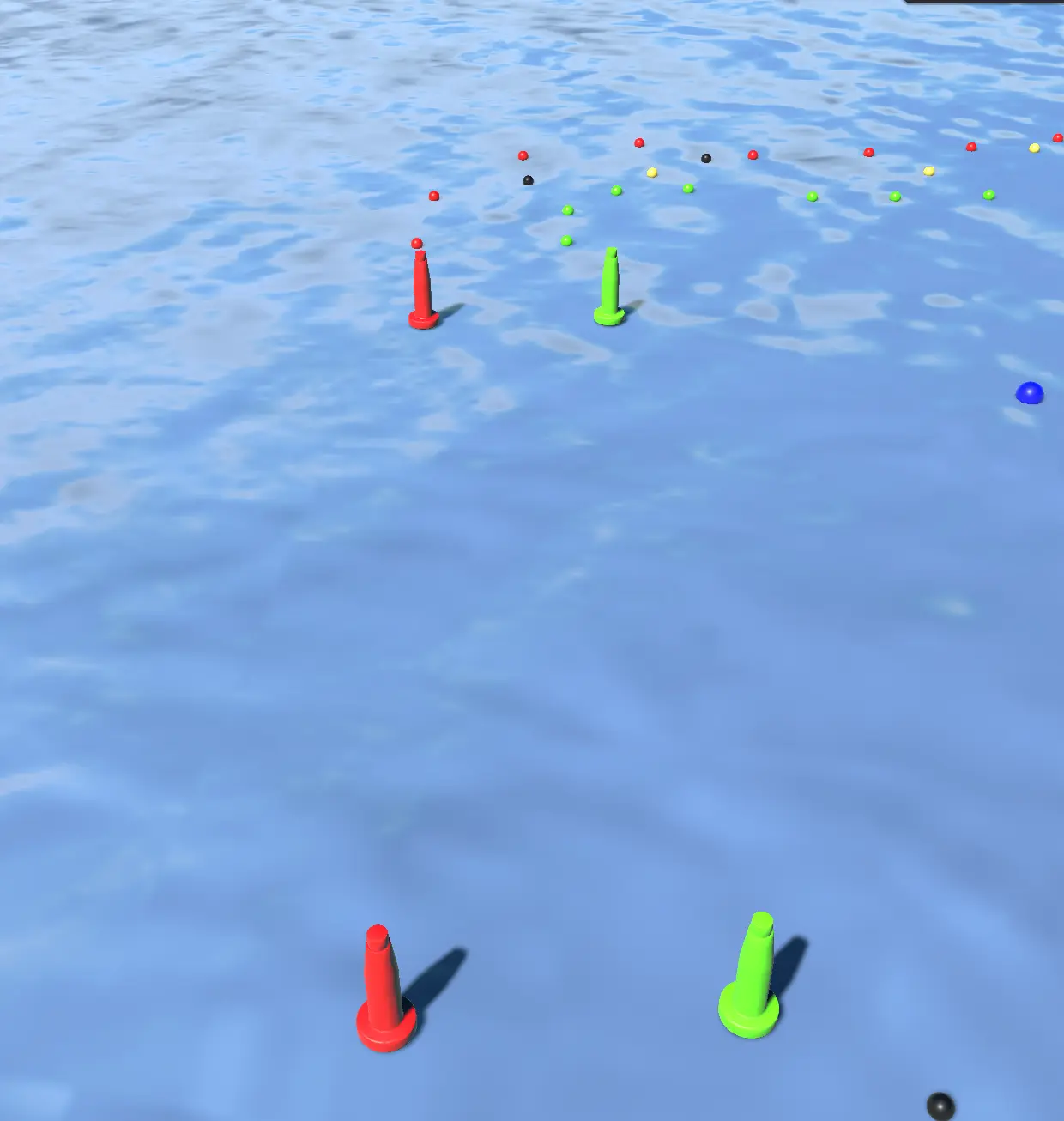
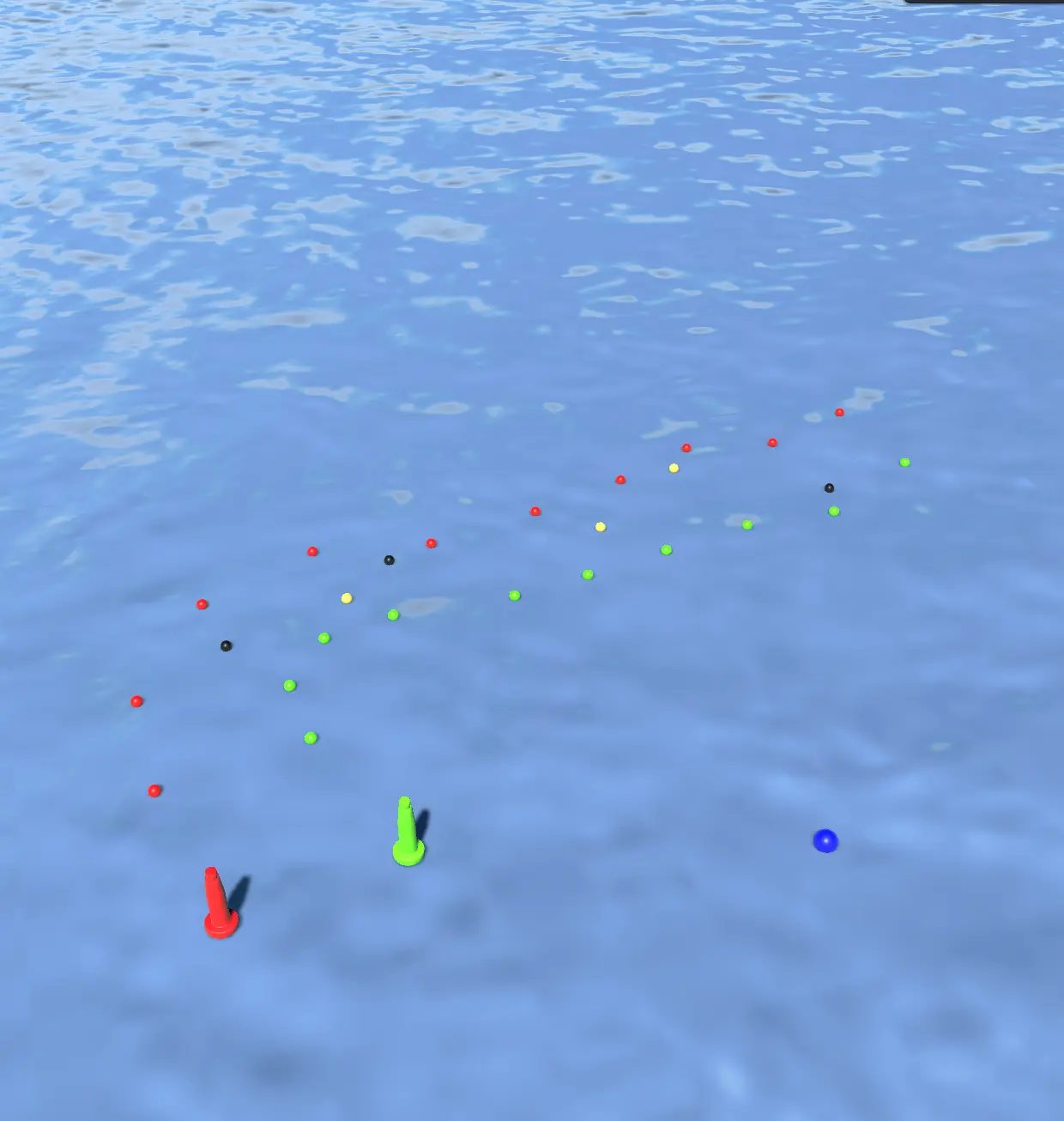
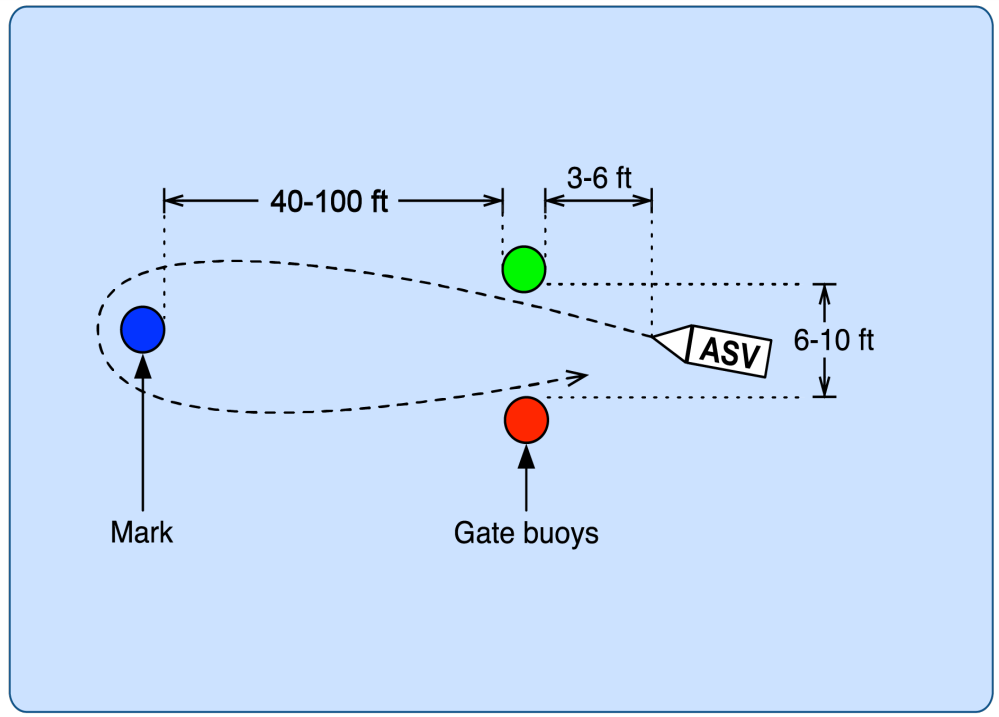
The team colloquially refers to this as the "Speed Challenge".
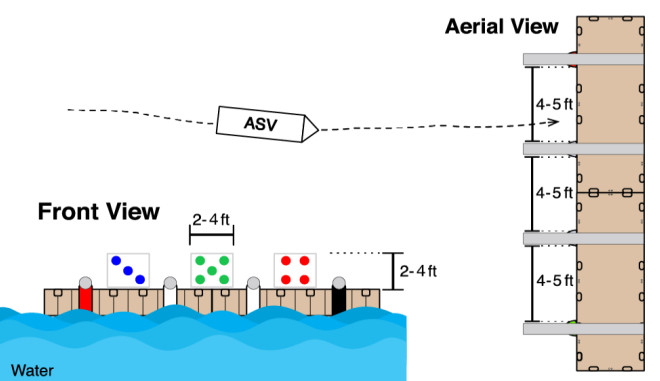
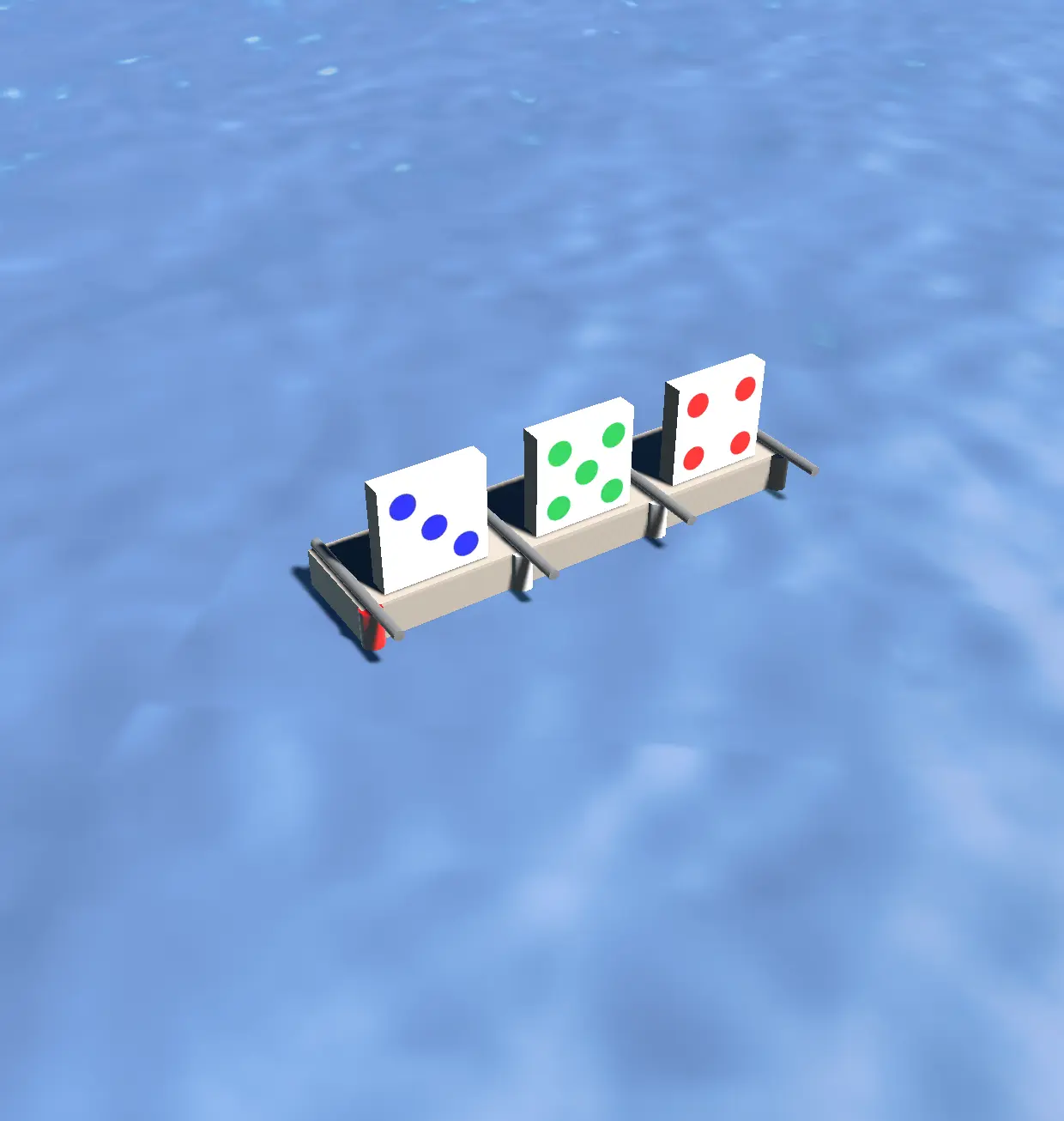
The team colloquially refers to this challenge as "Docking."
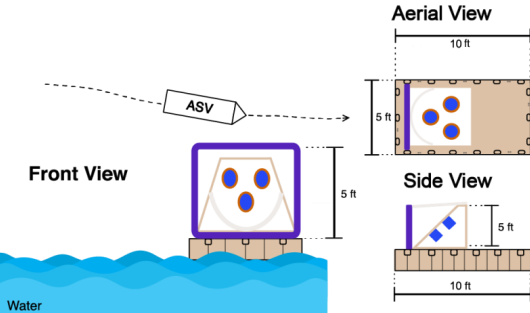
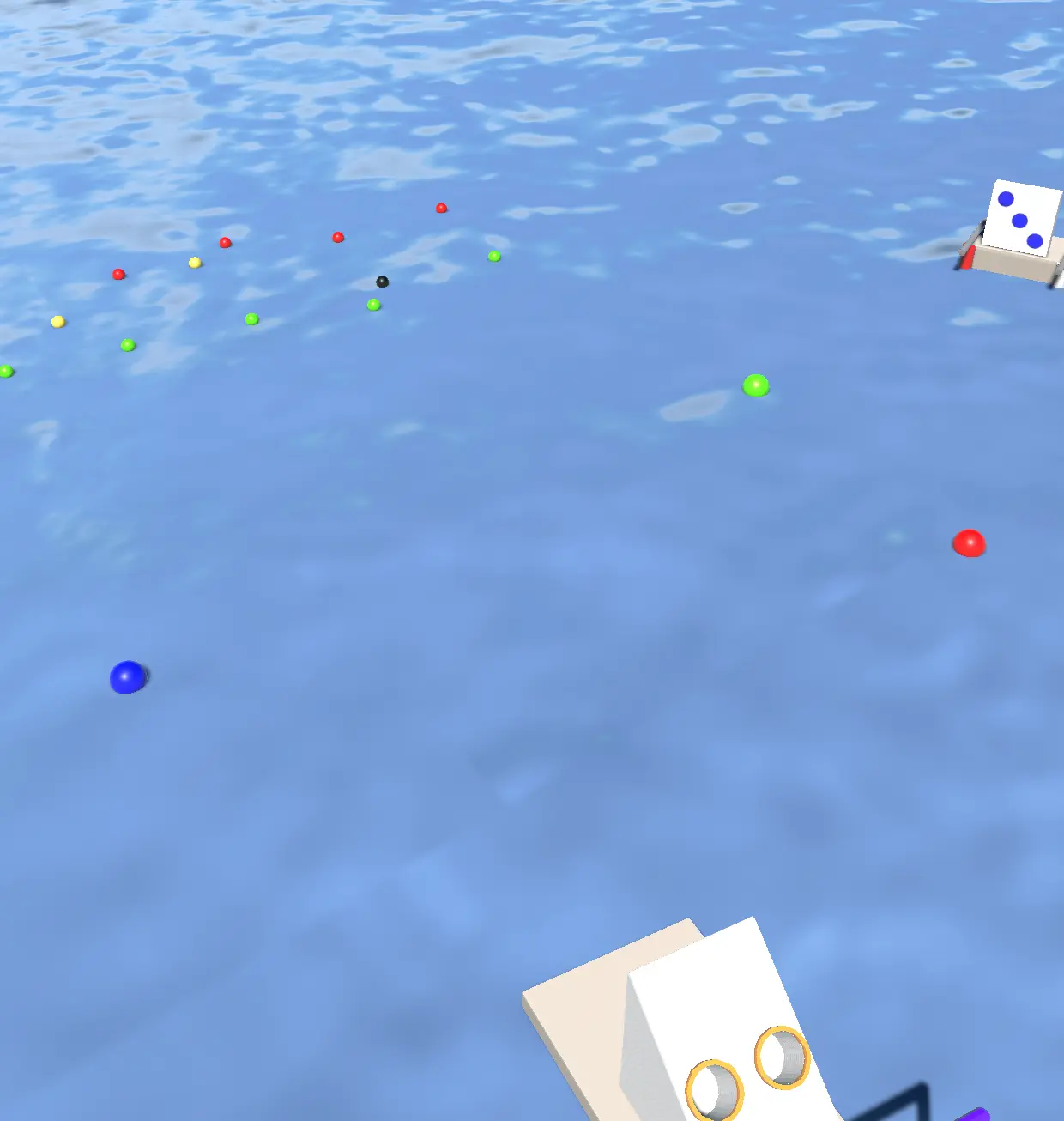
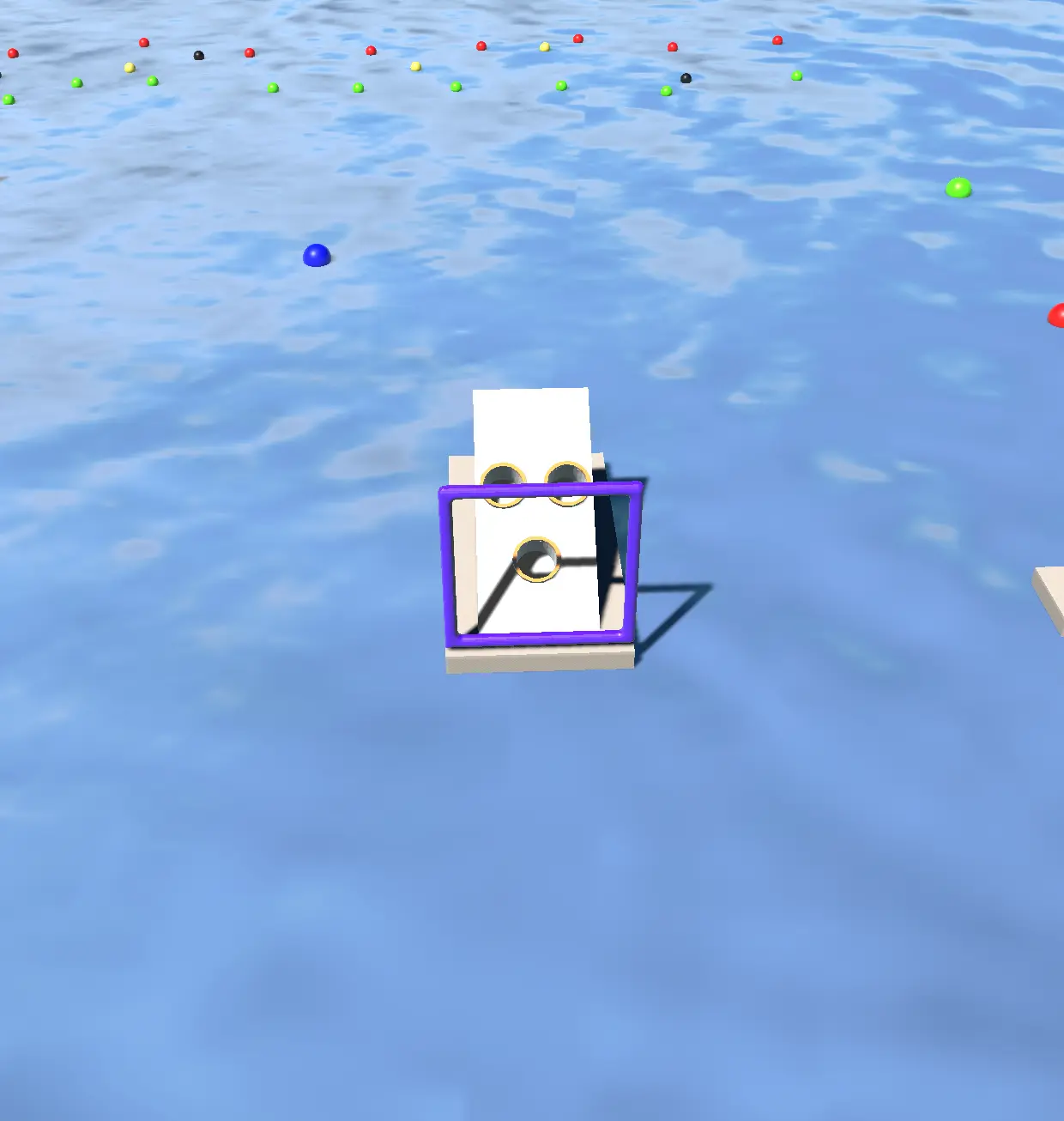
The team colloquially refers to this challenge as "Skeeball," the classic arcade game.
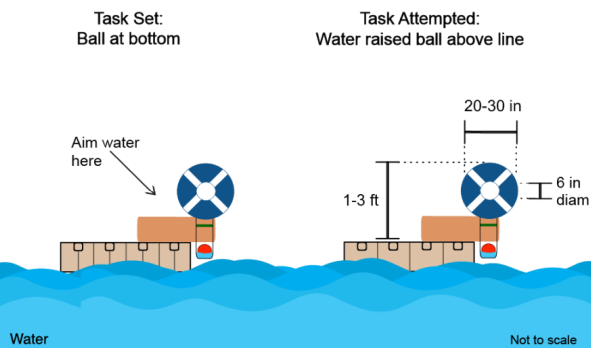
The team colloquially refers to this challenge as "Water Blast."
Both tasks only had three teams that could shoot anything. No teams landed balls in the buckets.


UM::Autonomy placed 6th overall, and 3rd among American Universities.

UM::Autonomy placed 1st in the technical report, 2nd in the video, and 1st in the presentation for an overall 3rd place in design documentation.

UM::Autonomy placed 9th. 13 teams scored no points in the autonomous challenge.

The team feels very confident for the 2024 season. Many new members attended competition for the first time, creating an exciting environment where many members are familiar with competition practices allowing us to achieve further success in future years.