Photo from RoboBoat 2023: Ocean
Exploration
RoboBoat 2026: Storm Response
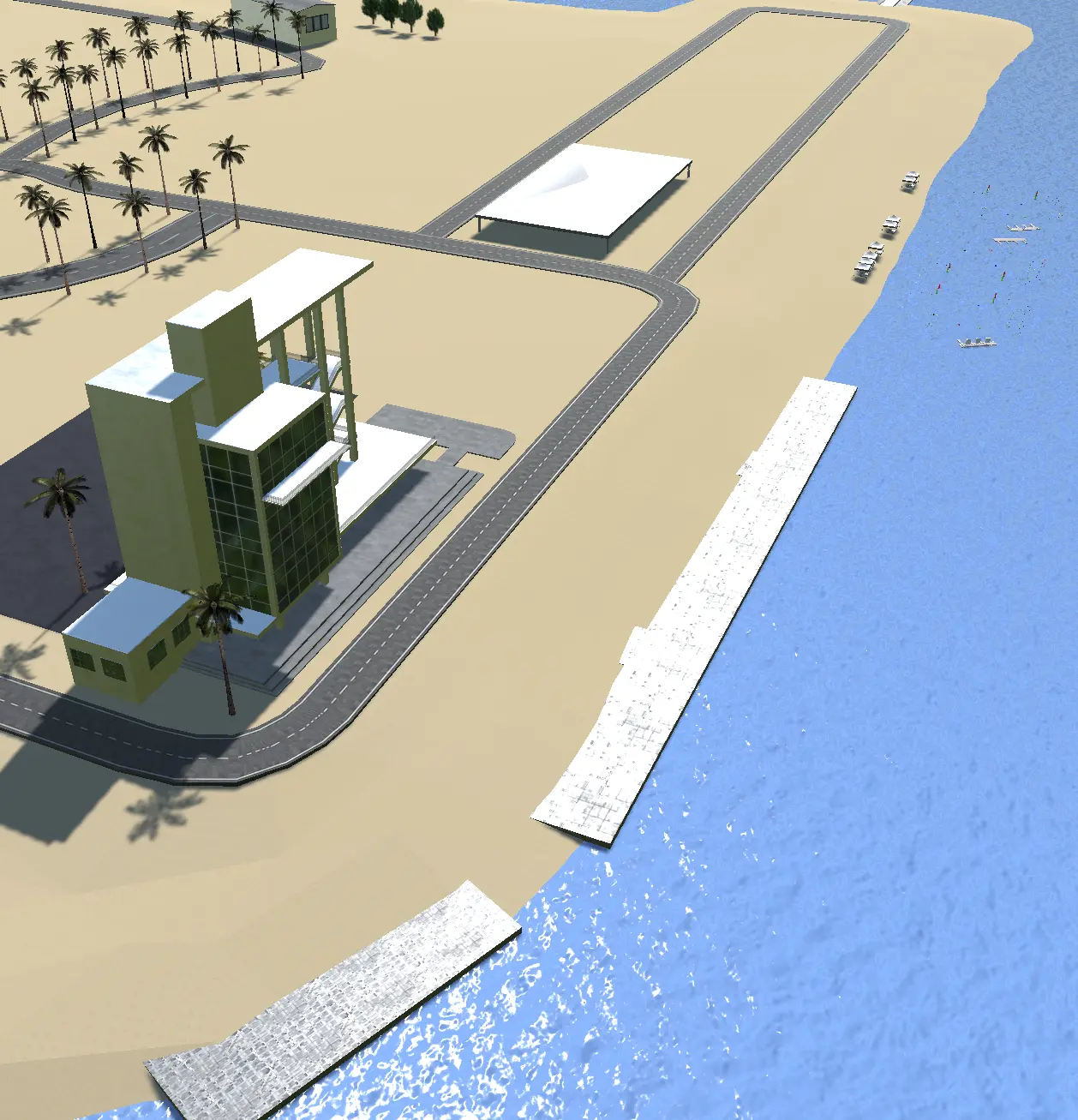
Nathan Benderson Park
Sarasota, Florida
RoboNation RoboBoat is an international
competition
where students design, build, and compete with
autonomous surface vessels, in a series of tests aimed at challenging teams through a
variety of autonomous (self-driving) tasks. We will be joined by 27 other teams from 4 continents.
Competition Strategy
Following the success of our previous 2-year design cycle with the Phoenix, we continued this strategy with the
Orca hull. This year marks the second iteration of
the Orca, incorporating targeted improvements to enhance stability, increase internal capacity, and improve propulsion
efficiency based on competition data and performance analysis from last year.
Building upon a proven hull geometry allowed our mechanical team to implement refinements with greater confidence, while our AI team advanced software capabilities and system reliability in parallel. We improved our computer vision pipeline, developed smarter onboard memory systems to address last year's navigation challenges, and upgraded our path planning algorithms for smoother, more efficient paths. The electrical team streamlined our systems with custom PCB designs to reduce complexity and improve maintainability.
Understanding that competition success comes from tested and reliable systems, we emphasized thorough validation from the start. Our simulator with realistic wave dynamics allowed continuous parallel development, while monthly in-water testing sessions ensured our improvements worked in real conditions. This measured, iterative approach reflects our commitment to building consistently reliable and competitive vessels.
Scroll down for more details ↓
Static Judging Criteria
Besides a team's performance autonomously, we are judged on aspects of both our team and the
boat.
Design Documentation
The team must prepare a website, a
technical
design report, and
a video for judges to
score. These are evaluated based on how well they introduce the team and its structure
as well as design considerations of the boat.
Presentation
The team must present to the judges live their decisions leading to the design of the boat.
Other Judging Criteria
Before the boat can participate in an autonomous challenge, several prerequisite activites
must be completed.
Static Safety Inspection
As the boats are very high powered, a runaway boat could damage itself and hurt others.
Therefore, competition staff ensure that the boat follows several safety rules:
- The boat stops when a physical red button is pressed on the boat
-
The boat stops when a remote switch is flipped, or the remote switch loses power or
connection
-
The boat does not have any sharp edges so that people in the water can touch the boat safely
UM::Autonomy is proud to have been one of the first three teams to pass the safety inspection at the 2025
competition. We have continued this spirit throughout the 2025-2026 year: safety is considered highly
in all situations, from battery and testing site training to ensuring the vessel is safe at all times.
Boat Thrust-to-Weight Ratio
The competition rewards fast and light craft. Therefore, a sliding scale is used where points
are lost faster the heavier it gets. The boat is weighed and its thrust is measured every day
it is entered in the water. The Orca 2.0 weighs 50 pounds, the lightest weight
class.
Autonomy Challenge
The main part of the challenge is the tasks that the vessel must perform autonomously. However, we must first
qualify before we perform autonomous operation on the full course.
Qualification
Teams will be given opportunities to practice, display their capabilities, and earn their spot in the final
round. They will have access to three duplicate courses, each containing the eight tasks. Throughout this time,
teams can choose to test strategies, gather data, or qualify for tasks. A certain level of completion—"minimum
performance criteria"—is required to complete a task. Once a team has qualified for enough tasks, they enter the
Semi-Final rounds.
Semi-Finals
Teams must score some number of points in Semi-Finals rounds to progress to Finals.
Finals
Teams who have successfully qualified will have access to the finals courses. Importantly, each vessel must
operate autonomously for the entire duration of the run; remote-controlled survey runs are not allowed. This means
teams cannot manually control their vessels to gather data or assess the field before or during their time slot,
emphasizing the critical importance of pre-run preparation and programming accuracy. They will be required to
navigate through initial gates, attempt a series of tasks in their chosen sequence, and finally return to the home
base to conclude the run. All teams making it to the final round will secure a higher final ranking over those who
do not reach this stage of the competition.
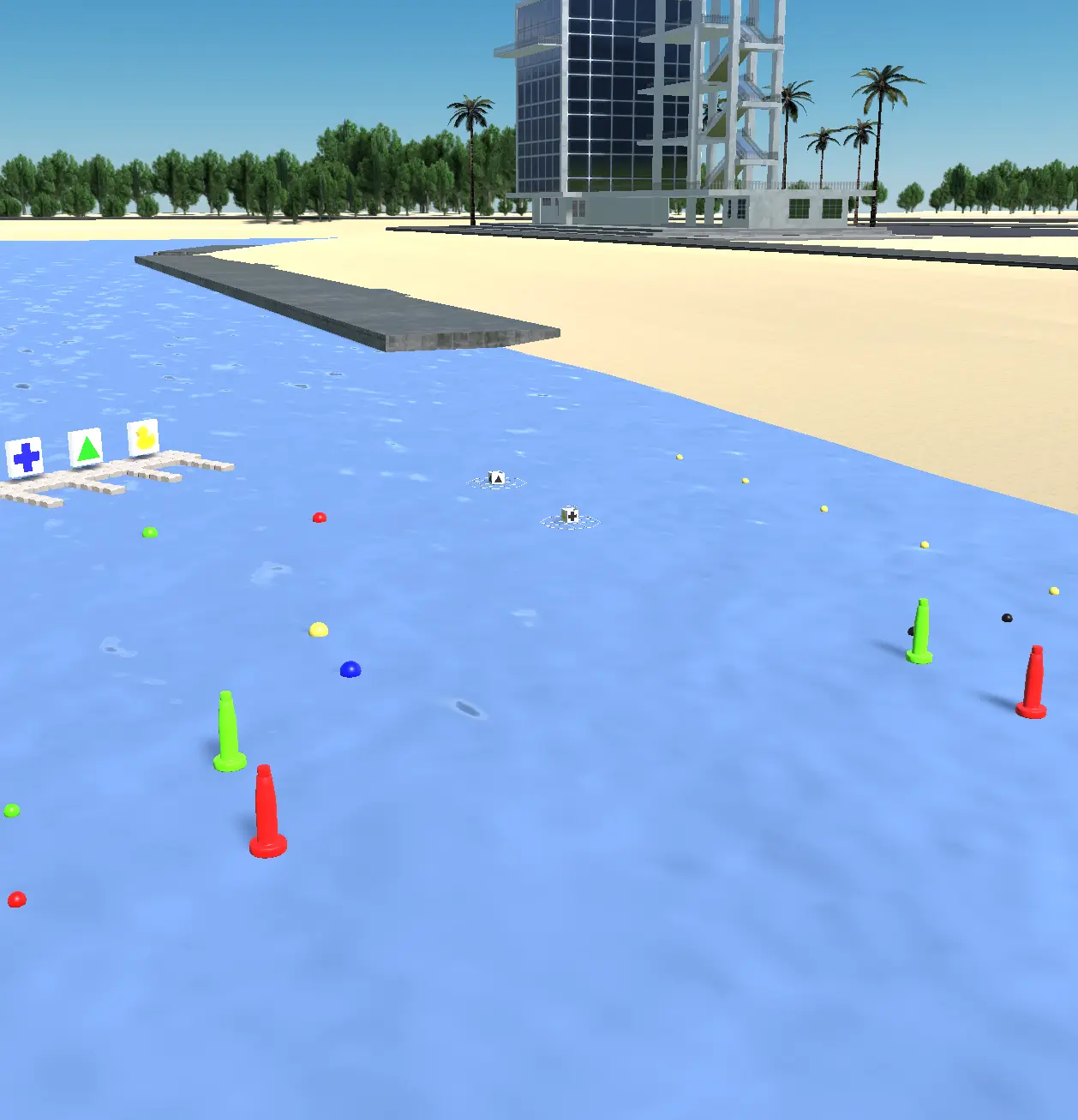
High Priority Challenges
Evacuation Route & Return

- Description
-
This challenge is mandatory before attempting other tasks. The ASV needs to pass through two
sets of gates (a pair of red and green buoys) and starts autonomous navigation at a minimum
of 6 ft before the set of gates.
- Analysis
-
As it is mandatory, this challenge is of high importance. In 2019, the boat could only
successfully pass the Entry & Exit Gates once out of four qualification runs as a result of
a major electrical failure onboard. In 2025, it was completed with high success due to our extensive testing in
water and in simulation.
However, additional tuning was needed upon arrival to the competition site as the boat's computer vision system
would occasionally fail to detect a buoy and the gps calibration sometimes failed.
- Goal
- 14 out of 15 successful runs
Debris Clearance
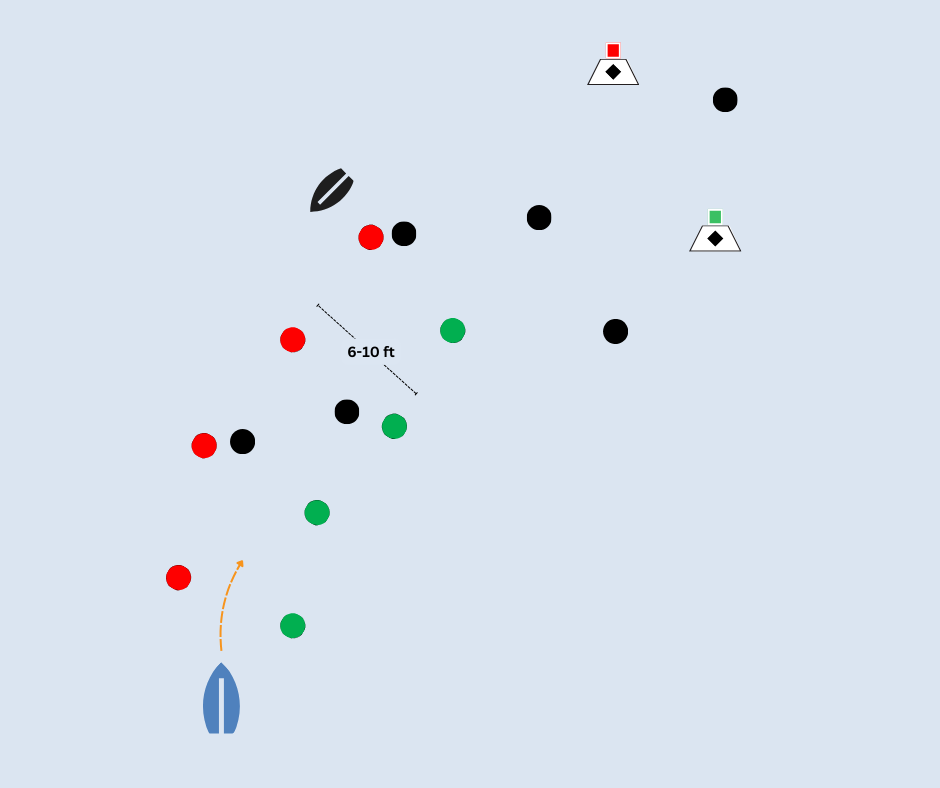
- Description
-
The ASV must sense and maneuver through the channel, staying within the defined pathway, and avoiding contact with obstacles along the way.
The ASV enters the debris field and scans for floating debris hazards.
- Analysis
-
To complete the Navigation Channel task, Task Planning identifies red and green buoys in the path.
These are then used to create a spline interpolation of the path, which builds a curve of the path layout based on points on the curve denoted by red and green buoys.
This spline algorithm then creates waypoints in a curve, and remembers these for the end of the task.
Each waypoint is then sent to Navigation, which uses an A* algorithm to generate an optimal path from the vessel's current location.
This algorithm accounts for the vessel's dynamics and places high-cost zones on either side of the gates to ensure it travels between the buoys.
As a result, the vessel receives reliable, accurate routes to follow.
- Goal
- 9 out of 10 successful runs
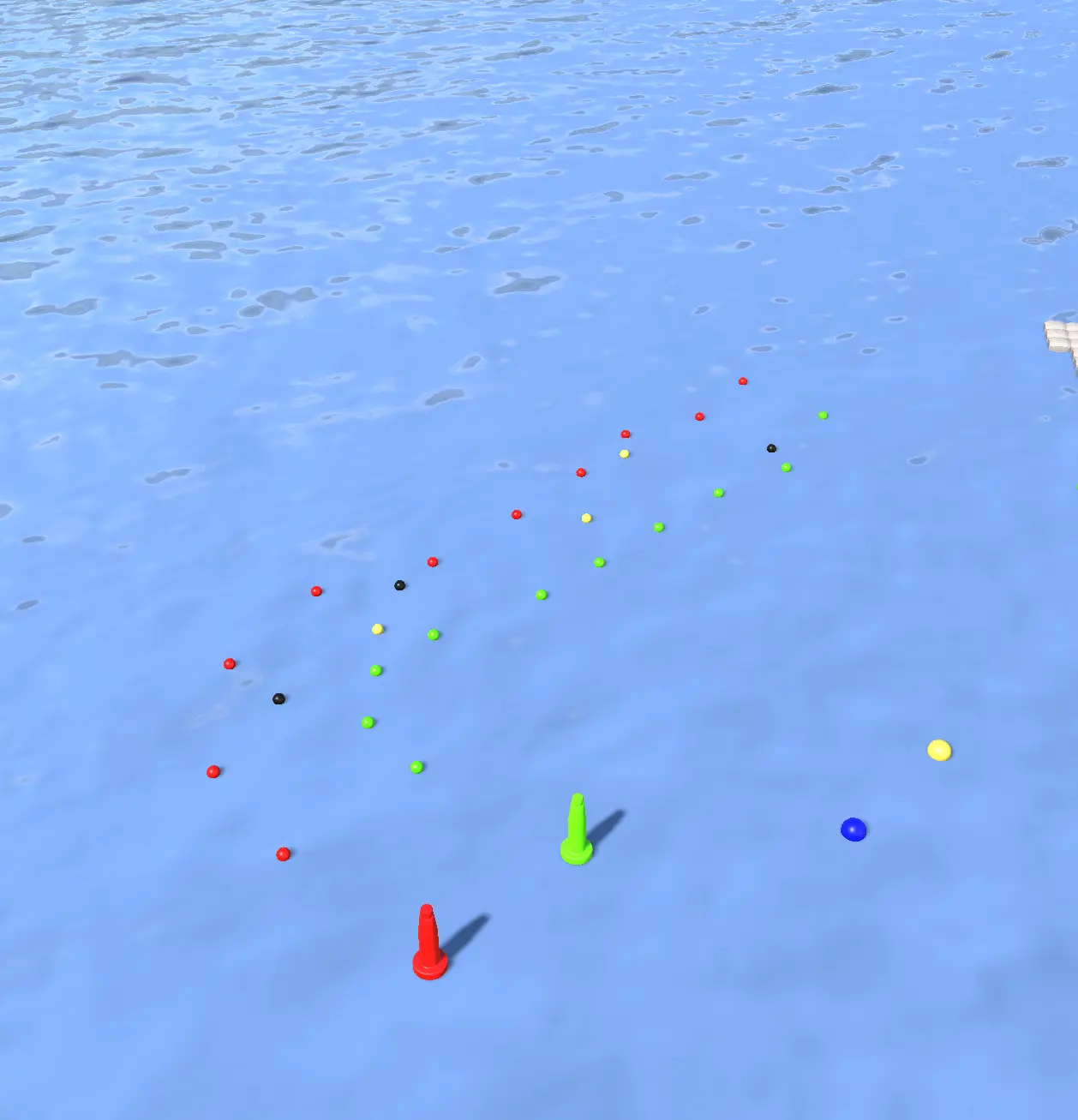
Emergency Response Sprint
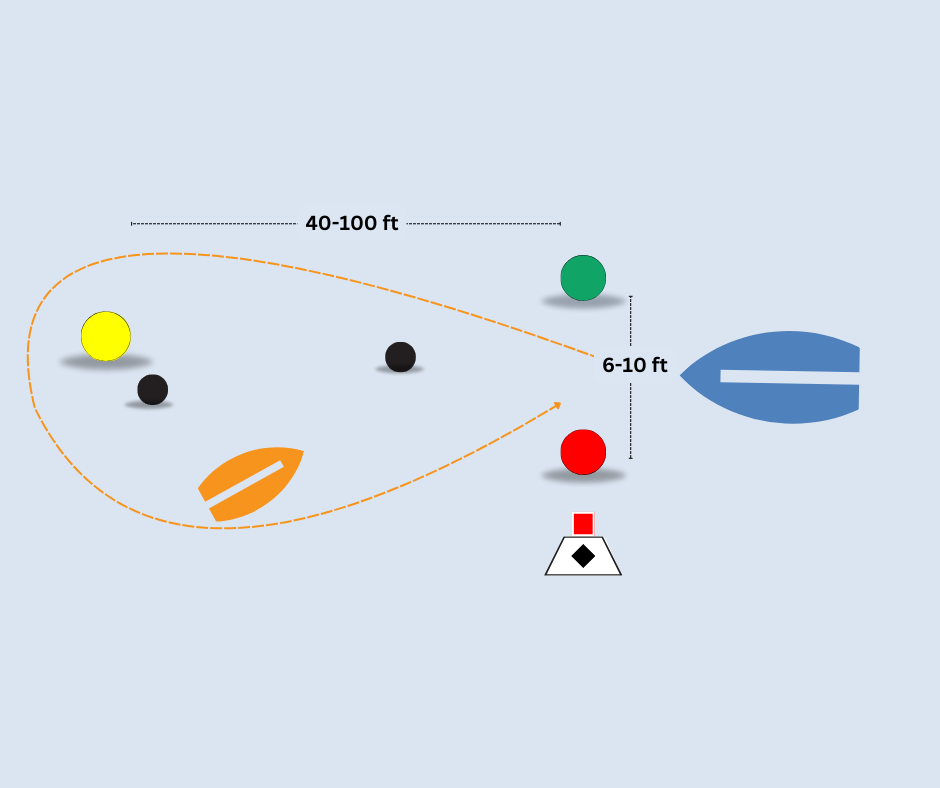
- Description
-
The ASV enters the gate buoys, maneuvers around the yellow marker buoy, and exits thought the same
gate buoys, as quickly as possible. The timer starts when the bow (front) crosses the gate
buoys and stops when the stern (back) crosses the gate buoys.
- Analysis
-
The vessel notes in other tasks the location of the speed light buoy or the starting red and green buoys, and uses these to get to the beginning of this task.
The vessel will then move forward until it sees the location and color of the light buoy, and then preempts the forward movement and either uses waypoints to
circle left if it sees a green light beacon, or right if it sees a red light beacon. The vessel uses the navigation and controls algorithm to avoid any black buoy debris.
- Goal
-
9 out of 10 successful runs. We hope for a baseline of 45 seconds, and a goal of 35 seconds.
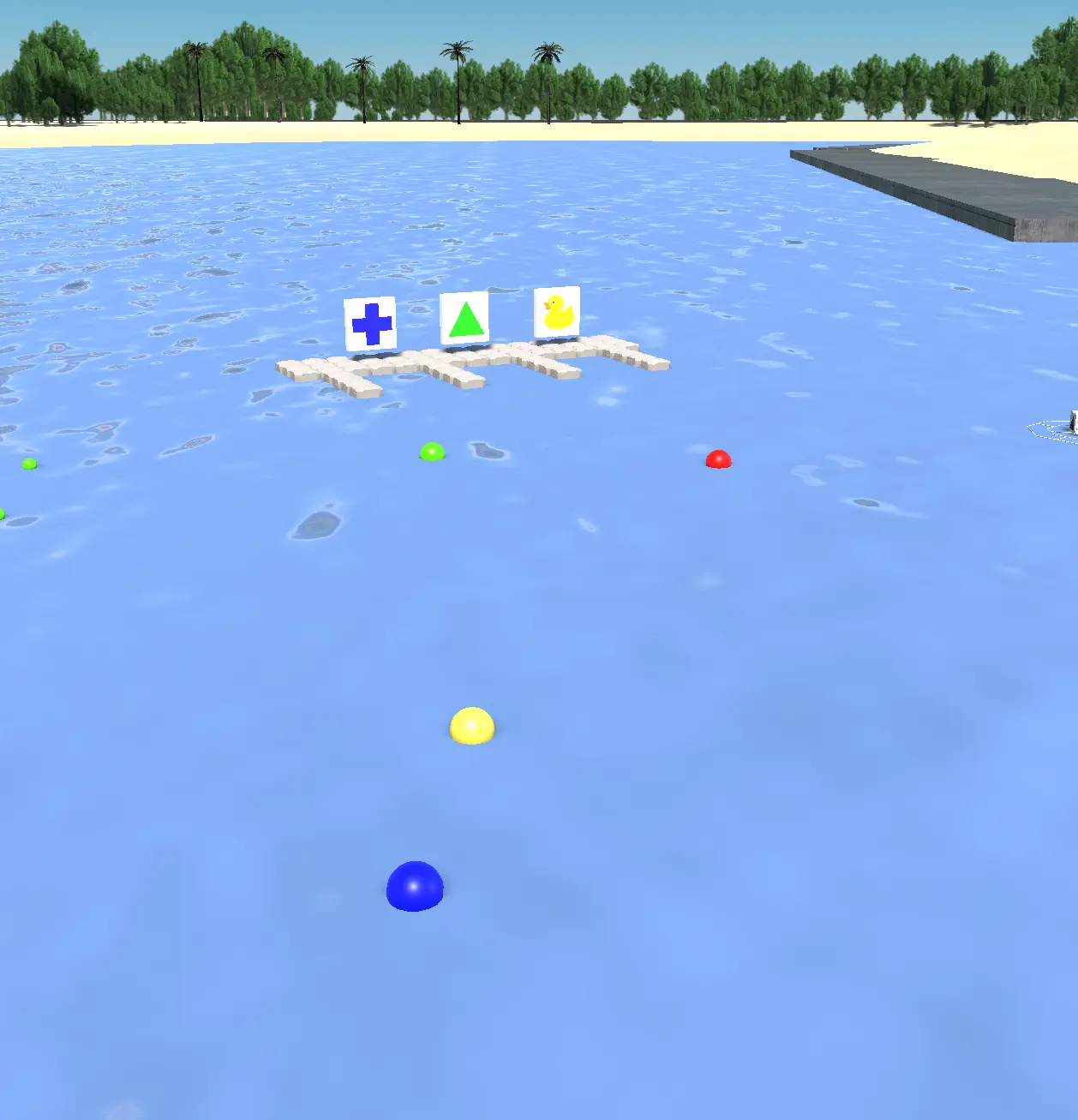
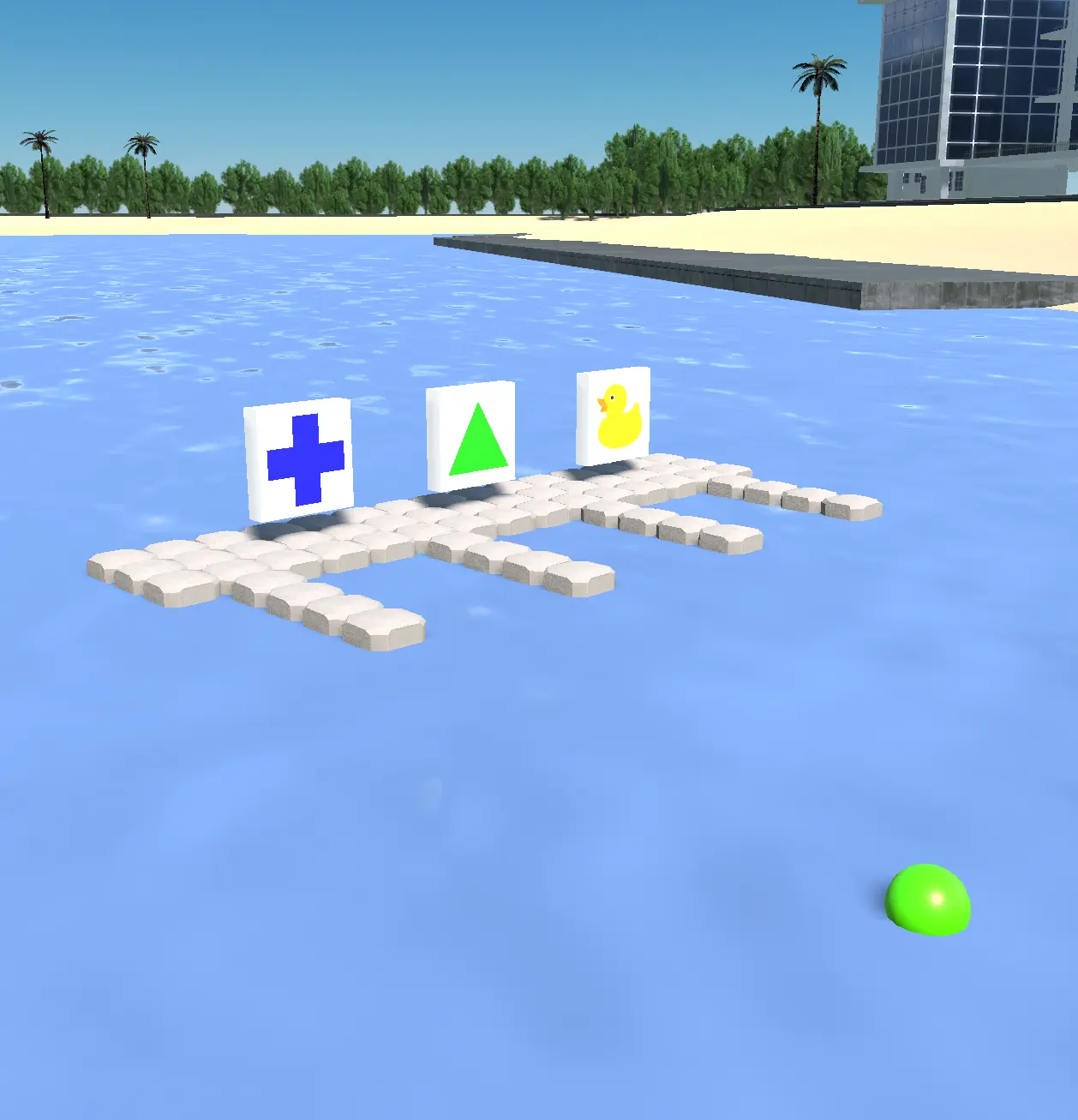
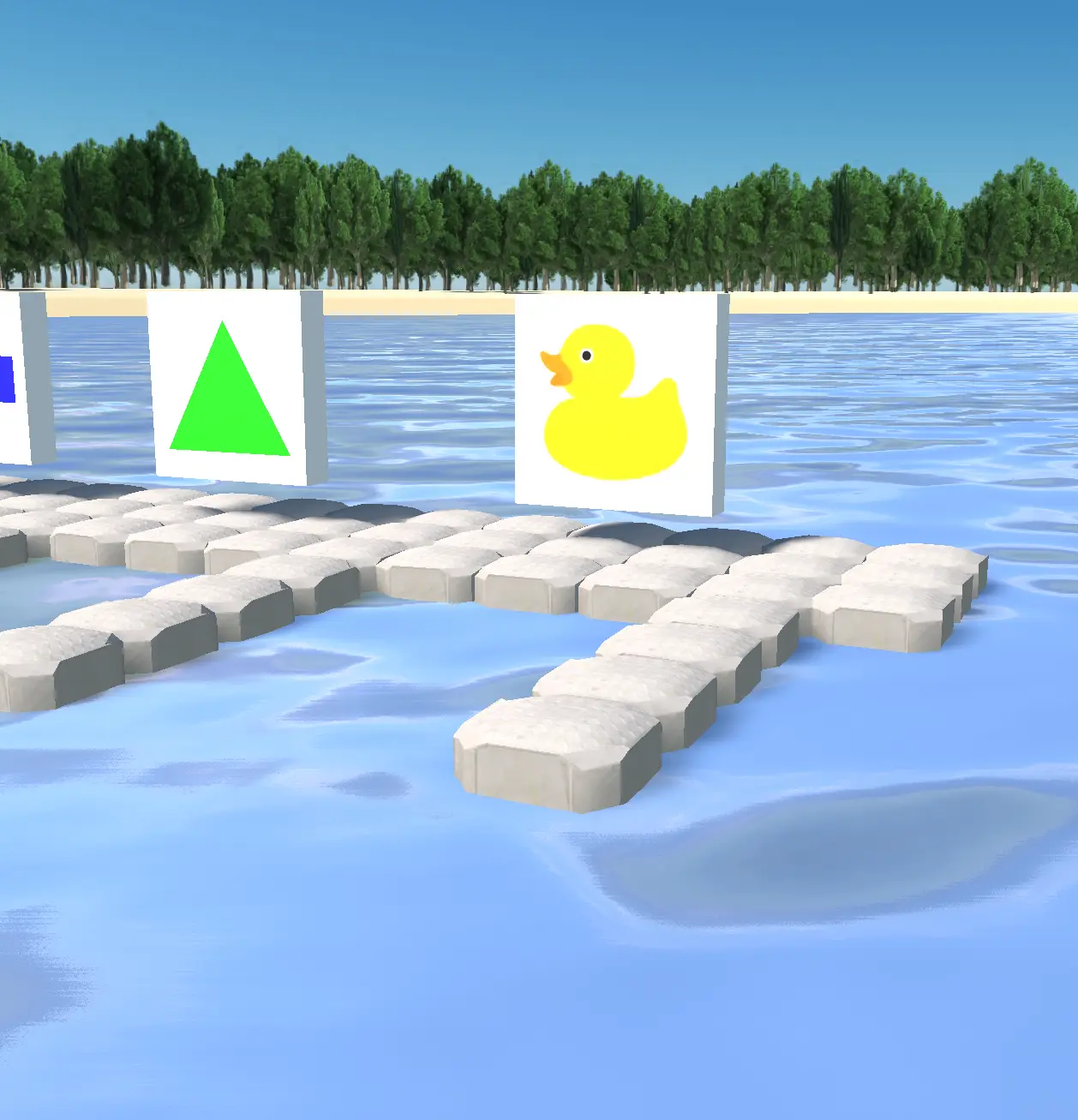
Navigate the Marina
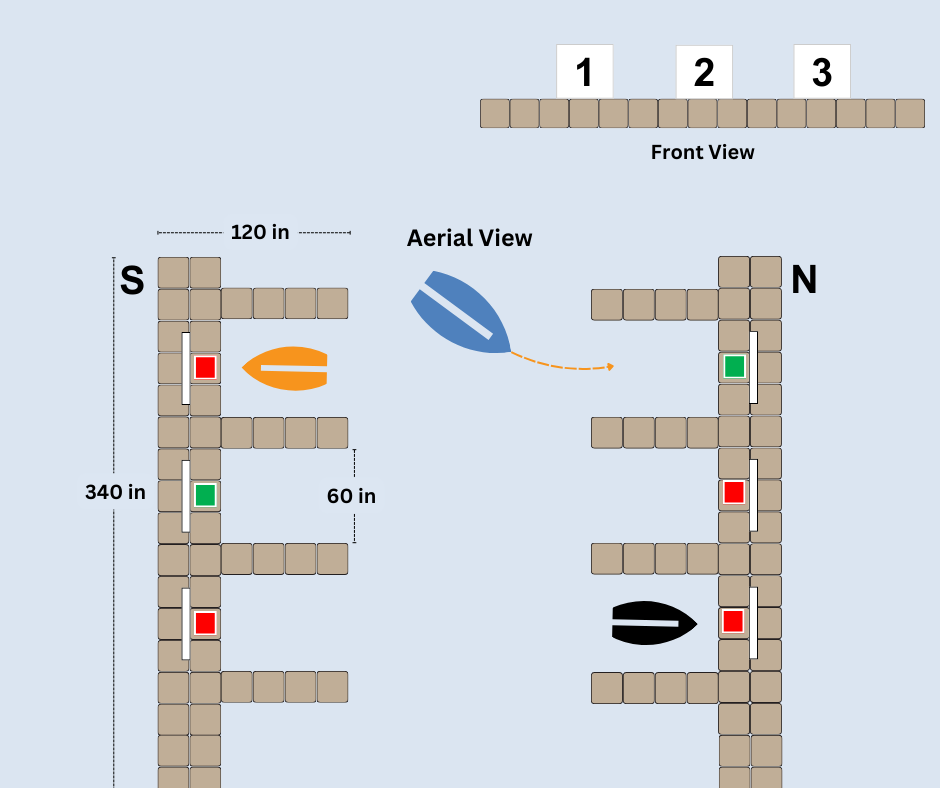
- Description
-
The ASV must enter the marina and dock in an available slip (indicated by green color indicator).
Each dock slip has a number sign: 1-3.
The ASV must dock in the most desirable open dock, indicated by the lowest number available.
- Analysis
-
This challenge is a bit more involved in terms of computer and color/shape recognition but
does not require external hardware development. We plan to train our computer vision model to detect the right numbers and colors,
as well as take other boats into account.
- Goal
- 9 out of 10 successful runs
Medium Priority Challenges
Harbor Alert
- Description
-
The Harbor Alert task simulates an emergency maritime command-and-control, testing the ability of autonomous systems to detect,
interpret and act on real-time dynamic cues that override other mission objectives, mirroring emergency maritime operations.
The ASV detects an audible signal and immediately abandons current task.
- Analysis
-
The vessel will constantly listen for the harbor sound and will abandon the task it is on, saving state such as location and current progress.
To process the audio signal, we first apply the Hanning window to the audio stream.
This prepares the data to get passed through the Discrete Fourier Transform, after which we have a spectrum of frequencies and their magnitude.
We check whether the designated frequency of 600, 800, or 1000 Hz is in this spectrum and at a large enough magnitude.
If so, we start tracking the length of time that this frequency persists for.
If this matches either of the signal patterns, this gets sent to Task Planning.
Task Planning will proceed to stop the current task, making note of location and task progress at this point,
and set course towards the location corresponding to the signal pattern.
- Goal
- 3 out of 5 successful runs
Lower Priority Challenges
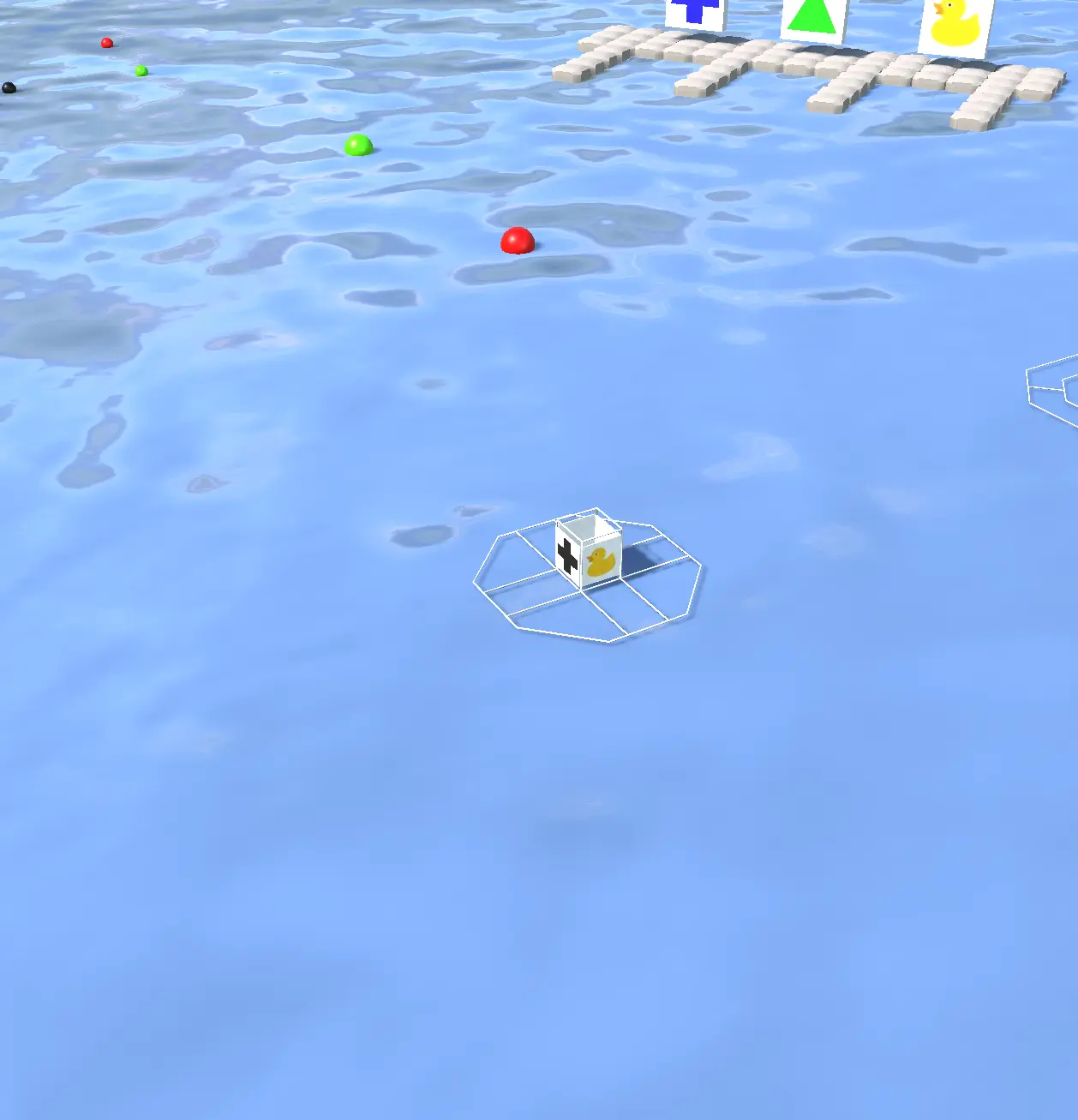
Supply Drop
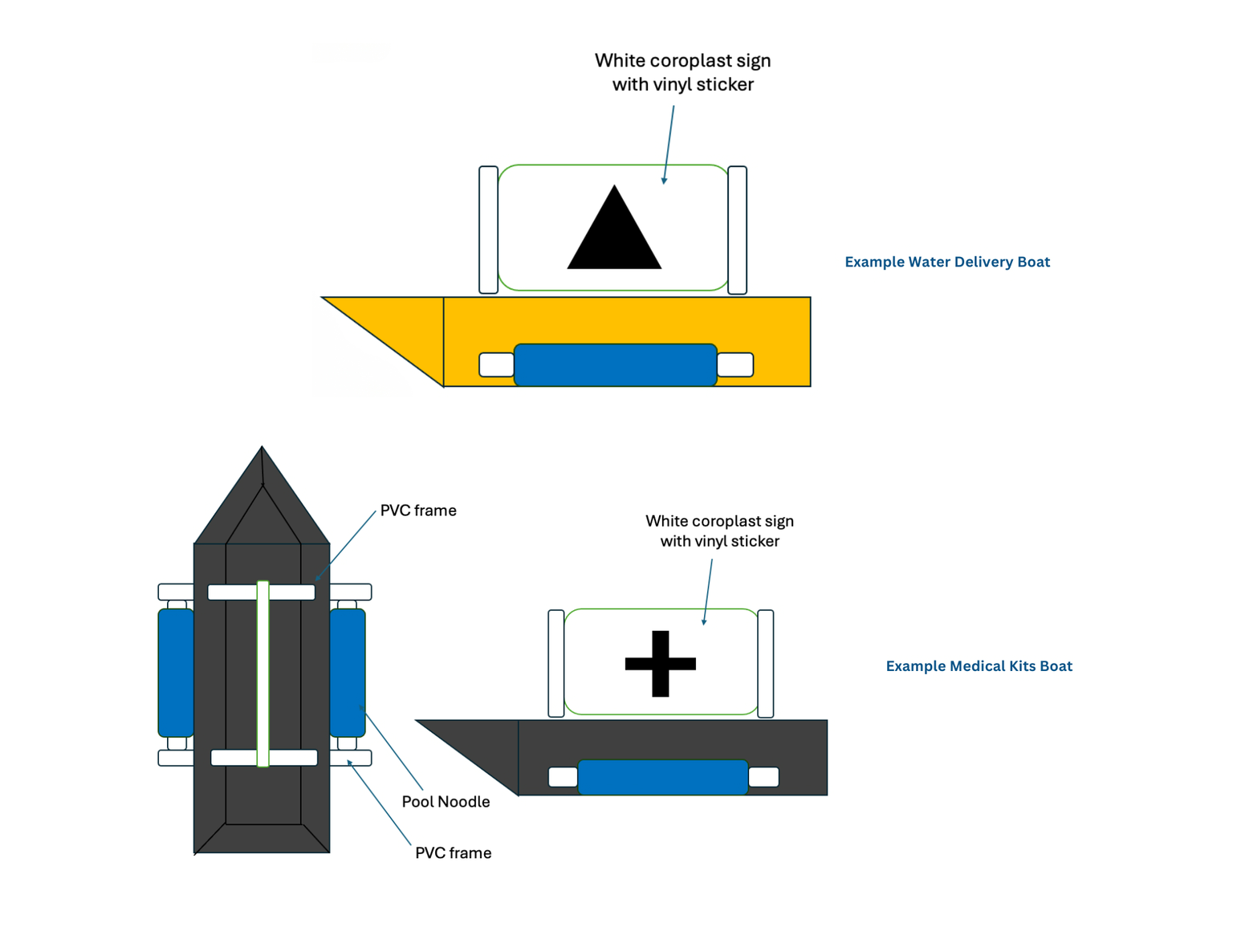
- Description
-
The ASV detects up to three (3) yellow boats that are anchored throughout the course with a black triangle shape fixed to both sides of the boat.
The ASV locates the boats and delivers/shoots water at the black triangle shape.
The ASV should strike (with a steady and visible stream of water) the black triangle shape for at least 3 seconds.
The ASV detects up to three (3) black boats that are anchored throughout the course, with a black plus-shape fixed to both sides of the boat.
The ASV locates the black vessels and delivers a racquetball to the vessel, either striking the plus sign or inside of the vessel hull;
or simply dropping the ball into the hull of the vessel is acceptable.
- Analysis
-
We expect this challenge to be somewhat difficult, although we still plan to complete it. We are designing a
simple mechanism to deliver the preloaded balls and water to this challenge throughout the course and during tasks.
We expect a challenge in detecting the specific areas to deliver balls to.
- Goal
- 2/6 successful deliveries
UM::Autonomy extends a special thanks to Cole Biesemeyer from the Open Source Robotics
Foundation for the 3D model of Nathan Benderson Park and Gdańsk University of Technology's
SimLE: SeaSentinel team for creating 3D models of various competition elements.